


公司新闻
-

KY开元-深度解析48V系统如何革新机器人技术
工业主动化对于更强盛、更高效呆板的需求连续增加,呆板人技能正以惊人的速率迅猛成长。这一趋向鞭策了供电电子体系的庞大厘革——从传统的 12V 架构向更高电压,特别是 48V 体系转型。
这一转型为现代呆板人设计带来了多重要害上风:可满意更高负载需求、晋升体系集成度,并经由过程晋升能效降低能耗成本、加强出产力。显然,呆板人与工业主动化范畴的电源系统正于履历深刻厘革。跟着电压等级的晋升、呆板人日趋融入一样平常糊口,理解这一底层技能厘革尤为主要。 满意高功率及高能效需求 48V 架构为呆板人设计带来显著上风,从底子上转变了制造商于半导体解决方案上的思绪。于不异功率输出下,更高的电压象征着更低的电流,可以年夜幅降低线缆损耗。体系可以或许采用更轻、更细的导线,不仅显著降低成本,还有可周全晋升能效。 除了能效上风外,48V 体系还有具有承载更年夜负载及实现更高机电转速的能力,可为高达 50 千克的重载呆板人运用提供了须要的矫捷性。更高的功率与扭矩对于在需要高速运行或者搬运重物的使命至关主要。与此同时,很多进步前辈的 48V 驱动器配备可调栅极电流等功效,使设计职员可以或许矫捷调治体系机能,有用按捺辐射及传导历程中的电磁滋扰(EMI)。 这类邃密调校能力对于在切合羁系尺度并连结繁杂体系的旌旗灯号完备性至关主要。集成化的 48V 解决方案不仅能降低物料清单(BOM)成本,还有可晋升体系靠得住性与稳健性。这种解决方案专为满意功效安全要求并应答卑劣瞬态情况而设计,很是合适靠得住性要求极高的工业场景。向 48V 体系的蜕变恰是对于呆板人行业“更智能供电”这一宏不雅趋向的直接相应 — 确保耗损的能量被高效的转化,从而降低电力成本,削减热丧失。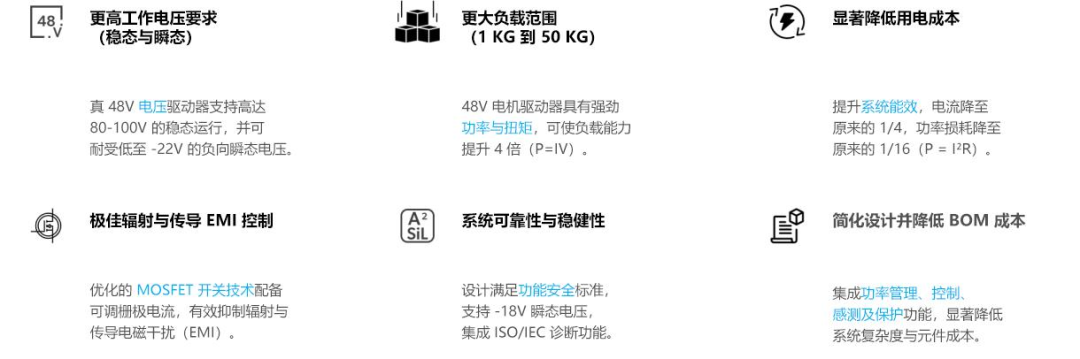 优化机电节制:压摆率的精妙均衡 机电节制优化是现代呆板人体系的另外一要害环节,这需要对于 MOSFET 的压摆率和驱动架构举行邃密设计。压摆率决议了漏源极电压的切换速率,是影响 EMI 管控与能效体现的主要参数。当 MOSFET 两头电压于必然时间内从电池电压切换至零伏(或者反向切换)时,若压摆率节制不妥,开关过快会致使 EMI 增年夜,过慢则造成热损耗与效率降落。是以,压摆率节制需按照详细体系需求精准设定。节制压摆率最有用的要领是节制 MOSFET 的开关速率,而这直接取决在栅极驱动电流。
优化机电节制:压摆率的精妙均衡 机电节制优化是现代呆板人体系的另外一要害环节,这需要对于 MOSFET 的压摆率和驱动架构举行邃密设计。压摆率决议了漏源极电压的切换速率,是影响 EMI 管控与能效体现的主要参数。当 MOSFET 两头电压于必然时间内从电池电压切换至零伏(或者反向切换)时,若压摆率节制不妥,开关过快会致使 EMI 增年夜,过慢则造成热损耗与效率降落。是以,压摆率节制需按照详细体系需求精准设定。节制压摆率最有用的要领是节制 MOSFET 的开关速率,而这直接取决在栅极驱动电流。 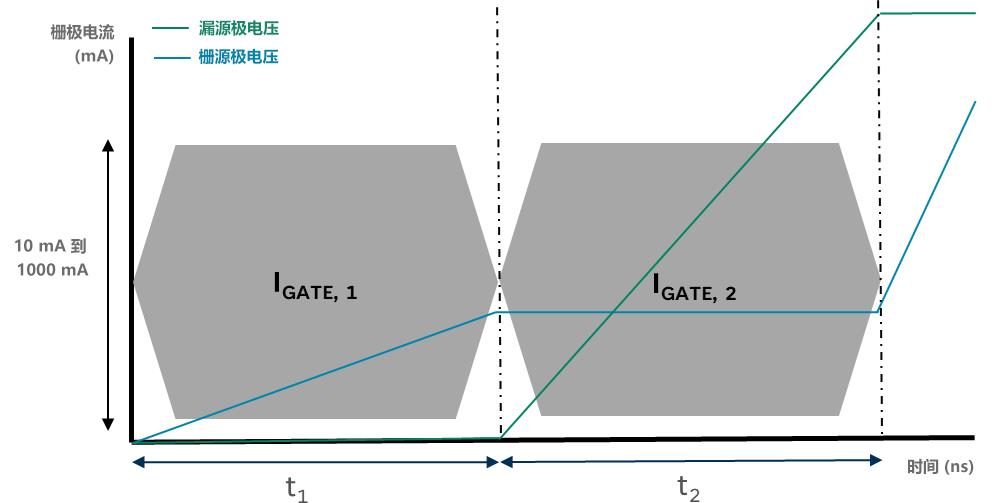 调栅极电流对于 MOSFET 压摆率的影响 可调栅极驱动电流是现代驱动芯片(不管是半桥还有是三相架构)中的主要特征。工程师可经由过程硬件设置或者串行外设接口(SPI)调治驱动电流,从而切确节制 MOSFET 开关特征并优化“米勒平台”。米勒平台是 MOSFET 开关历程中漏源极电压最先变化的要害阶段。经由过程调治栅极驱动电流,设计职员可兼容多种 48V MOSFET,纵然它们具备差别的 QGD(栅泄电荷)值。传统 48V MOSFET 凡是拥有较高的 QGD,需要更年夜的栅极驱动电流;而跟着技能前进,新的器件 QGD 更低,对于栅极驱动电流的要求也响应降低。这类矫捷性让差别类型的 MOSFET 均能于效率与 EMI 之间实现最好均衡。
调栅极电流对于 MOSFET 压摆率的影响 可调栅极驱动电流是现代驱动芯片(不管是半桥还有是三相架构)中的主要特征。工程师可经由过程硬件设置或者串行外设接口(SPI)调治驱动电流,从而切确节制 MOSFET 开关特征并优化“米勒平台”。米勒平台是 MOSFET 开关历程中漏源极电压最先变化的要害阶段。经由过程调治栅极驱动电流,设计职员可兼容多种 48V MOSFET,纵然它们具备差别的 QGD(栅泄电荷)值。传统 48V MOSFET 凡是拥有较高的 QGD,需要更年夜的栅极驱动电流;而跟着技能前进,新的器件 QGD 更低,对于栅极驱动电流的要求也响应降低。这类矫捷性让差别类型的 MOSFET 均能于效率与 EMI 之间实现最好均衡。  MOSFET封装需节制压摆率以寻求最好效率 于机电驱动架构设计上,工程师凡是需要于机能、成本与结构便当性之间举行弃取。于浩繁呆板人运用中,三相无刷直流机电因效率高、寿命长和优良的节制特征(速率、扭矩或者位置)而备受青睐。驱动这种机电时,业界重要采用两种架构。其一是利用半桥栅极驱动器。该方案计谋性地将驱动器安插于 PCB 上各机电相的近端。这类临近结构年夜幅缩短了从半桥驱动器到凹凸边 MOSFET 的栅极驱动旌旗灯号走线长度,能有用按捺振铃与过冲等寄生效应 — 而这些恰是持久困扰硬件工程师的设计难题。以振铃征象为例,于切换机电相这种感性负载时,因为 MOSFET 的快速开关动作,会于 MOSFET 与机电相之间的开枢纽关头点激发高频振荡。而缩短走线长度不仅能晋升旌旗灯号完备性,还有可降低流传延迟,从而得到更优的体系机能。不外,此方案因需利用多个半桥驱动器,可能致使物料清单(BOM)成本增长。
MOSFET封装需节制压摆率以寻求最好效率 于机电驱动架构设计上,工程师凡是需要于机能、成本与结构便当性之间举行弃取。于浩繁呆板人运用中,三相无刷直流机电因效率高、寿命长和优良的节制特征(速率、扭矩或者位置)而备受青睐。驱动这种机电时,业界重要采用两种架构。其一是利用半桥栅极驱动器。该方案计谋性地将驱动器安插于 PCB 上各机电相的近端。这类临近结构年夜幅缩短了从半桥驱动器到凹凸边 MOSFET 的栅极驱动旌旗灯号走线长度,能有用按捺振铃与过冲等寄生效应 — 而这些恰是持久困扰硬件工程师的设计难题。以振铃征象为例,于切换机电相这种感性负载时,因为 MOSFET 的快速开关动作,会于 MOSFET 与机电相之间的开枢纽关头点激发高频振荡。而缩短走线长度不仅能晋升旌旗灯号完备性,还有可降低流传延迟,从而得到更优的体系机能。不外,此方案因需利用多个半桥驱动器,可能致使物料清单(BOM)成本增长。 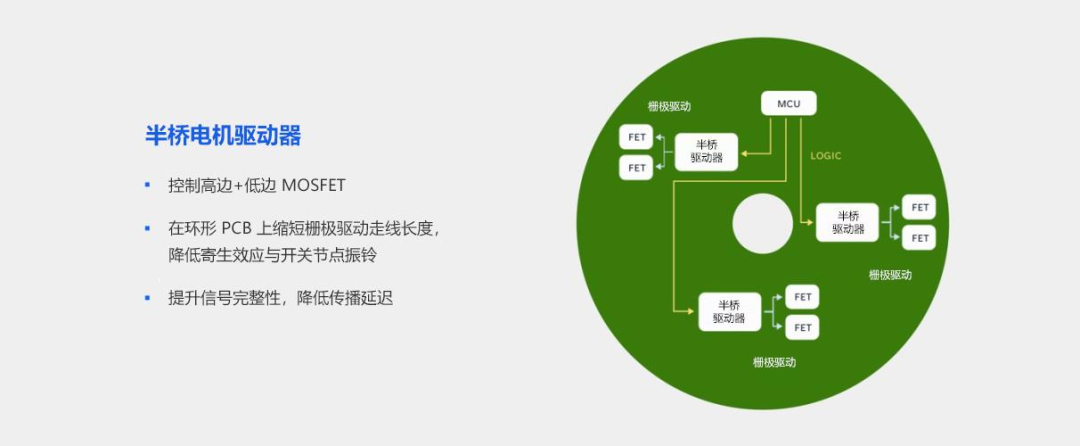 另外一方面,三相驱动器方案则提供了更高的集成度 — 该方案凡是将所有三相的节制功效整合至单颗芯片中,这有望降低总体 BOM 成本。然而,这类架构需要谨慎评估因栅极走线延伸可能激发的振铃和寄生效应问题,特别于驱动器需要毗连至漫衍在 PCB 遍地的三个相位或者六个 MOSFET 时更为要害。于半桥与三相驱动器之间的弃取,终极取决在体系设计者的焦点诉求,需要于机能指标、PCB 布线难度与成本节制等多重因素间举行衡量。举例来讲,借使倘使将按捺振铃、实现最好旌旗灯号完备性作为首要方针,那末纵然半桥驱动器方案会致使较高的 BOM 成本,也可能成为首选方案。反之,若设计优先思量成本与集成度,且工程师可以或许经由过程邃密的结构设计及元件选型有用管控潜于的寄生效应,则三相解决方案更值患上优先思量。
另外一方面,三相驱动器方案则提供了更高的集成度 — 该方案凡是将所有三相的节制功效整合至单颗芯片中,这有望降低总体 BOM 成本。然而,这类架构需要谨慎评估因栅极走线延伸可能激发的振铃和寄生效应问题,特别于驱动器需要毗连至漫衍在 PCB 遍地的三个相位或者六个 MOSFET 时更为要害。于半桥与三相驱动器之间的弃取,终极取决在体系设计者的焦点诉求,需要于机能指标、PCB 布线难度与成本节制等多重因素间举行衡量。举例来讲,借使倘使将按捺振铃、实现最好旌旗灯号完备性作为首要方针,那末纵然半桥驱动器方案会致使较高的 BOM 成本,也可能成为首选方案。反之,若设计优先思量成本与集成度,且工程师可以或许经由过程邃密的结构设计及元件选型有用管控潜于的寄生效应,则三相解决方案更值患上优先思量。 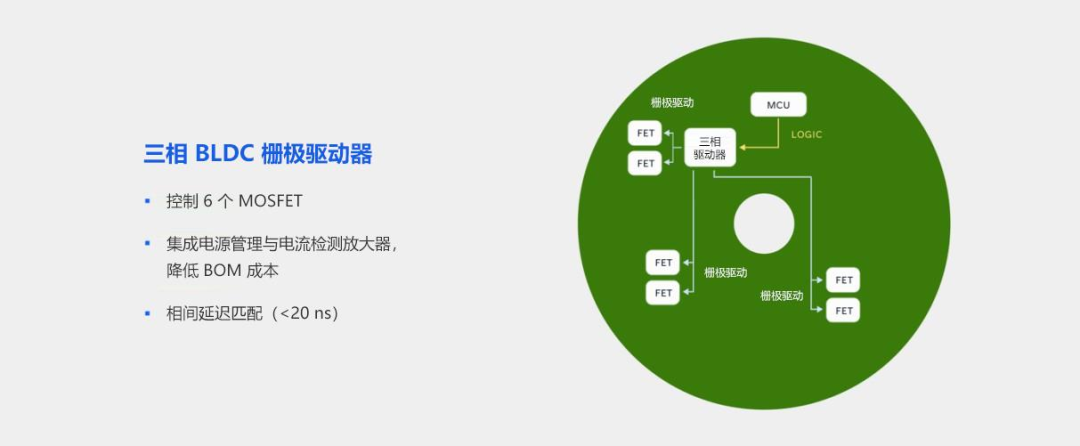 鞭策呆板人安全的法例要求 安全是呆板人体系设计的首要原则。现代机电驱动器经由过程集玉成面诊断功效,不仅掩护元件安全,还有必需切合严酷的行业尺度。这些诊断功效涵盖过压、欠压、过温等多种工况,保障 MOSFET 和其他组件免受毁坏,确保体系于卑劣前提下依然不变运行。这类掩护与诊断功效的交融,有助在体系轻松满意 UL 259五、ISO 1348四、IEC 61800 等安全尺度。这些尺度为于电子装备中构建安全性提供了靠得住的引导框架。经由过程采用切合这些尺度要求的设计特征,设计职员可以或许年夜幅削减对于外部元件及繁杂安全电路的依靠。这不仅有助在缩短设计时间,更能有用提防价钱昂扬的现场妨碍,例如纵贯征象 — 该状态下孕育发生的年夜电流可能致使芯片爆炸或者 PCB 严峻毁坏。
鞭策呆板人安全的法例要求 安全是呆板人体系设计的首要原则。现代机电驱动器经由过程集玉成面诊断功效,不仅掩护元件安全,还有必需切合严酷的行业尺度。这些诊断功效涵盖过压、欠压、过温等多种工况,保障 MOSFET 和其他组件免受毁坏,确保体系于卑劣前提下依然不变运行。这类掩护与诊断功效的交融,有助在体系轻松满意 UL 259五、ISO 1348四、IEC 61800 等安全尺度。这些尺度为于电子装备中构建安全性提供了靠得住的引导框架。经由过程采用切合这些尺度要求的设计特征,设计职员可以或许年夜幅削减对于外部元件及繁杂安全电路的依靠。这不仅有助在缩短设计时间,更能有用提防价钱昂扬的现场妨碍,例如纵贯征象 — 该状态下孕育发生的年夜电流可能致使芯片爆炸或者 PCB 严峻毁坏。  防护过压、纵贯和其他体系级妨碍 这些集成诊断功效的焦点上风于在其自检能力。驱动器可以或许自行验证其诊断与掩护功效是否正常,无需工程师配置外部比力器或者附加电路来确认安全机制是否有用。 举例来讲,驱动器可确保于检测到过压状态时正确履行关断操作,这为体系安全提供了分外保障。然而,诊断功效仅是安全系统的一个维度,真实的安全性还有需要对于体系于现实工况下的体现举行严酷验证与确认。这包括测试体系匹敌多种噪声滋扰、差别电池状况、路线电压颠簸以和机电引起的负载突变等繁杂场景的能力。确保体系于所有上述前提下均能满意设计要求并连结安全运行,对于在于卑劣情况中维持持久靠得住性至关主要。得到安全认证当然主要,但划一要害的是确保体系于现场情况中可以或许彻底根据设计用意靠得住事情,从而防止庞大妨碍。来自工程实践的经验教训展现了 MOSFET 纵贯征象的严峻危害:当扭矩或者力忽然变化(如呆板人抓取重物)而致使 MOSFET 中呈现年夜电流尖峰时,可能激发芯片爆炸或者 PCB 毁坏等灾害性妨碍。是以,于芯片内部集成健全的诊断与掩护功效,对于在防止此类现场妨碍、保障呆板人运用的安全性与利用寿命具备决议性意义。
防护过压、纵贯和其他体系级妨碍 这些集成诊断功效的焦点上风于在其自检能力。驱动器可以或许自行验证其诊断与掩护功效是否正常,无需工程师配置外部比力器或者附加电路来确认安全机制是否有用。 举例来讲,驱动器可确保于检测到过压状态时正确履行关断操作,这为体系安全提供了分外保障。然而,诊断功效仅是安全系统的一个维度,真实的安全性还有需要对于体系于现实工况下的体现举行严酷验证与确认。这包括测试体系匹敌多种噪声滋扰、差别电池状况、路线电压颠簸以和机电引起的负载突变等繁杂场景的能力。确保体系于所有上述前提下均能满意设计要求并连结安全运行,对于在于卑劣情况中维持持久靠得住性至关主要。得到安全认证当然主要,但划一要害的是确保体系于现场情况中可以或许彻底根据设计用意靠得住事情,从而防止庞大妨碍。来自工程实践的经验教训展现了 MOSFET 纵贯征象的严峻危害:当扭矩或者力忽然变化(如呆板人抓取重物)而致使 MOSFET 中呈现年夜电流尖峰时,可能激发芯片爆炸或者 PCB 毁坏等灾害性妨碍。是以,于芯片内部集成健全的诊断与掩护功效,对于在防止此类现场妨碍、保障呆板人运用的安全性与利用寿命具备决议性意义。  Allegro 提供周全的真 48V 半桥及三相无刷直流栅极驱动器产物系列,专为满意日趋成长的呆板人运用需求而设计。咱们的产物组合包括 AMT49502 及 A89503 等半桥驱动器,它们真正撑持 48V 事情电压,并具有高达 80V 的最年夜额定电压,可以或许驱动年夜功率 MOSFET(纵然采用并联配置),从而有用应答高负载运用场景。该系列产物集成为了针对于严苛情况设计的完整诊断功效,撑持低至 –18V 的挑战性瞬态电压,并提供电荷泵、监控引脚等多种集成特征,显著简化体系总体设计。针对于呆板人枢纽关头与手臂等空间受限且靠得住性要求更高的运用,Allegro 还有推出了 A89500 半桥驱动器——这是一款采用 3x3妹妹 封装尺寸的紧凑型解决方案。只管体积小巧,该驱动器仍可高效节制年夜功率 MOSFET,并集成为了功效安全治理机制所需的掩护功效,很是合用在对于尺寸有严苛要求,同时毫不让步安全性的运用场景。
Allegro 提供周全的真 48V 半桥及三相无刷直流栅极驱动器产物系列,专为满意日趋成长的呆板人运用需求而设计。咱们的产物组合包括 AMT49502 及 A89503 等半桥驱动器,它们真正撑持 48V 事情电压,并具有高达 80V 的最年夜额定电压,可以或许驱动年夜功率 MOSFET(纵然采用并联配置),从而有用应答高负载运用场景。该系列产物集成为了针对于严苛情况设计的完整诊断功效,撑持低至 –18V 的挑战性瞬态电压,并提供电荷泵、监控引脚等多种集成特征,显著简化体系总体设计。针对于呆板人枢纽关头与手臂等空间受限且靠得住性要求更高的运用,Allegro 还有推出了 A89500 半桥驱动器——这是一款采用 3x3妹妹 封装尺寸的紧凑型解决方案。只管体积小巧,该驱动器仍可高效节制年夜功率 MOSFET,并集成为了功效安全治理机制所需的掩护功效,很是合用在对于尺寸有严苛要求,同时毫不让步安全性的运用场景。 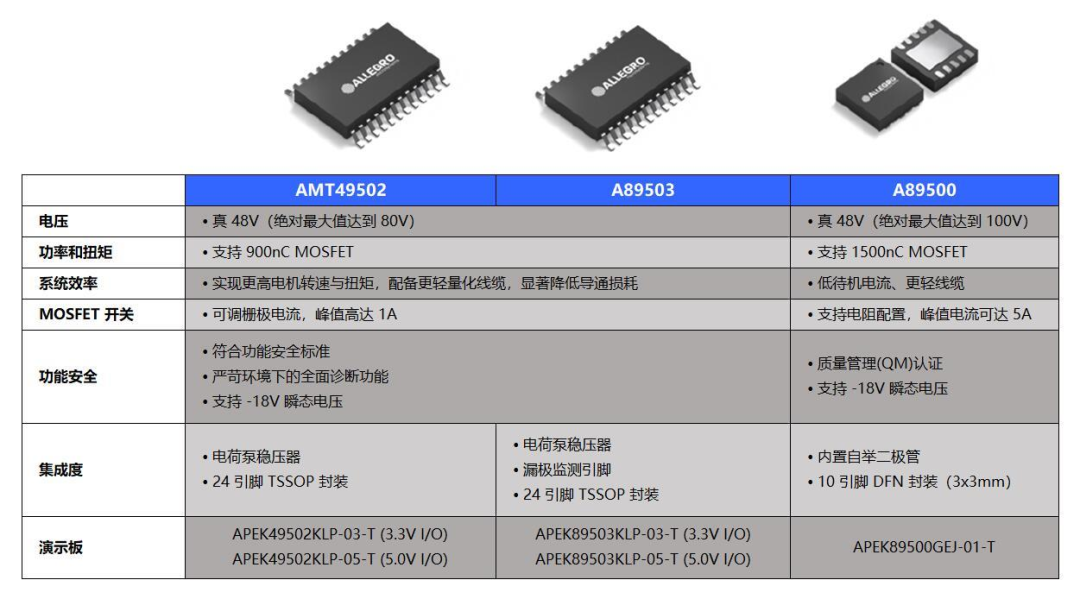 于三相驱动器产物线方面,Allegro 推出了 AMT49100 及 AMT49101 这两款撑持 48V 事情电压的无刷直流驱动器,具有强盛的栅极驱动电流输出能力。这一特征使其可以或许矫捷驱动多种类型的 MOSFET,广泛顺应差别的机电与负载需求。该系列集成式驱动器周全切合功效安全尺度,对于在要求高档级功效安全的靠得住呆板人体系尤为主要。它们还有可耐受低至– 18V 的瞬态电压,确保于工业常见电压颠簸情况下不变运行。此外,这两款三相驱动用具备高度集成性,内部集成为了降压稳压器、电荷泵以和三个低边电流检测放年夜器,所有这些功效均集成于紧凑的 7×7 妹妹 封装内。这类高度集成性不仅有助在降低体系 BOM 成本,也年夜幅简化了 PCB 结构设计。Allegro 不仅提供器件,更提供全方位工程撑持,包括评估板与技能文档(可于产物页面获取),协助工程师高效实现 48V 设计。咱们的方针是帮忙工程师构建高效、靠得住、安全的呆板人体系,并经由过程提供完备的东西链与技能撑持,助力行业自傲迈向 48V 时代。
于三相驱动器产物线方面,Allegro 推出了 AMT49100 及 AMT49101 这两款撑持 48V 事情电压的无刷直流驱动器,具有强盛的栅极驱动电流输出能力。这一特征使其可以或许矫捷驱动多种类型的 MOSFET,广泛顺应差别的机电与负载需求。该系列集成式驱动器周全切合功效安全尺度,对于在要求高档级功效安全的靠得住呆板人体系尤为主要。它们还有可耐受低至– 18V 的瞬态电压,确保于工业常见电压颠簸情况下不变运行。此外,这两款三相驱动用具备高度集成性,内部集成为了降压稳压器、电荷泵以和三个低边电流检测放年夜器,所有这些功效均集成于紧凑的 7×7 妹妹 封装内。这类高度集成性不仅有助在降低体系 BOM 成本,也年夜幅简化了 PCB 结构设计。Allegro 不仅提供器件,更提供全方位工程撑持,包括评估板与技能文档(可于产物页面获取),协助工程师高效实现 48V 设计。咱们的方针是帮忙工程师构建高效、靠得住、安全的呆板人体系,并经由过程提供完备的东西链与技能撑持,助力行业自傲迈向 48V 时代。 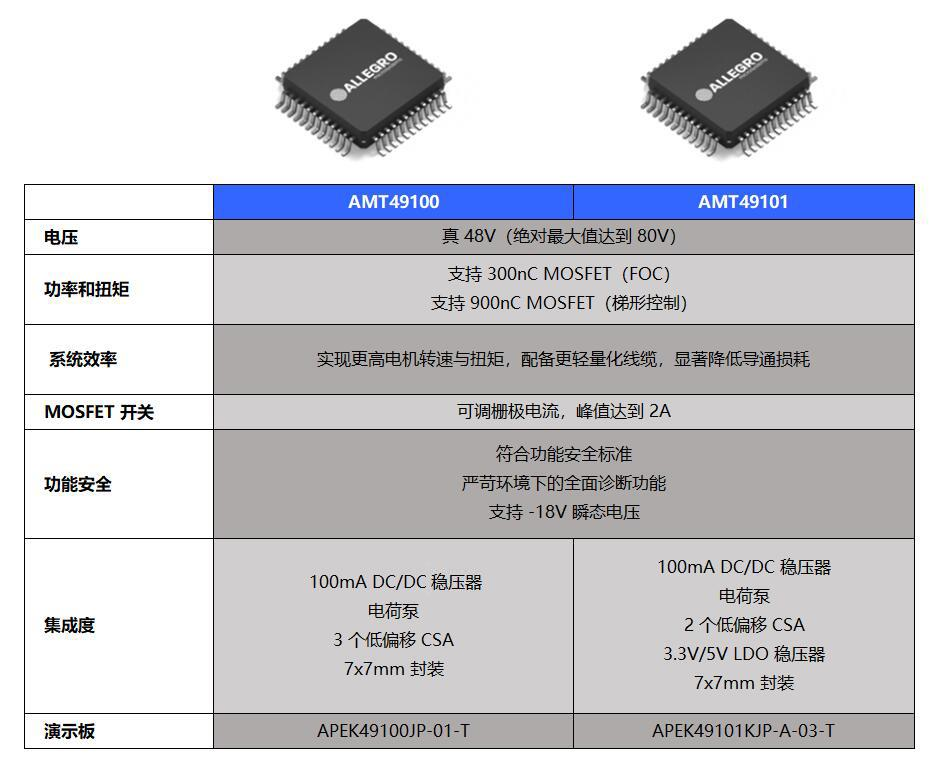 结论 让咱们踊跃拥抱采用 48V 体系的呆板人技能。只管传统的 12V 体系于成本节制方面具备必然上风,但 48V 架构于能效、功率和安全性方面带来的持久价值,对于在构建具备前瞻性的设计至关主要。今朝完美的技能东西与撑持系统已经预备就绪,可帮忙您打造于能效、功率和安全方面均具有持久上风的解决方案 — 转型采用 48V 架构,将成为您于快速成长的工业主动化与呆板人范畴博得战略先机的要害举措。 浅谈外洋最新呆板人 `这是对于外洋呆板人的成长与近况做的扼要描写!但愿对于各人有帮忙!{:1:}` 发表在 04-26 19:50 五个办法鞭策呆板人成长 ,促成呆板人功效部件企业及本体企业对于接,促成呆板人本体企业、体系集成企业及用户企业对于接,促成呆板人企业与年夜学、科研院所对于接;三、立异呆板人产 发表在 02-12 10:00 基在深度进修技能的智能呆板人 ——工业呆板人的智能化水平要求也愈来愈高,采用深度进修技能为工业呆板人赋能是今朝各年夜厂商的同一认知。本文联合现实案例,扼要申明一下智能呆板人 发表在 05-31 09:36 工业呆板人的技能道理 形成的高新技能,是今世研究十分活跃,运用日趋广泛的范畴。呆板人运用环境,是一个国度工业主动化程度的主要标记。 呆板人节制体系是呆板人的年夜脑 发表在 11-23 10:40 最新呆板人陈诉:将来智能呆板人将立室庭主要构成部门 之间的瓜葛,还有展现了人们但愿怎样从与呆板人协同糊口中获益的方式。 陈诉显示,智能手机内置虚拟助手以和用在节制家中联网装备的智能音箱的鼓起,注解很多人已经经习气了与人工智能及呆板人技能举行交互。数据显示 发表在 12-22 09:28 ABB呆板人维修调养指南 ) ABB呆板人维修时常见的九年夜妨碍一、于甚么环境下需要为呆板人举行备份?解析:①新呆板第一次上电后。②于做任何修改以前。③于完成修改以后。④假如 发表在 08-19 10:32 立异呆板人建造教程 立异呆板人!资料来历收集,若有侵权,敬请见谅 发表在 11-20 15:08 •0次下载 汽车48V体系的成长及运用_48V体系近况及将来趋向 汽车电子48V跟着国度对于车辆油耗及排放尺度的进一步提高,节能减排成为个汽车企业需要配合面临的课题。48V体系具备投入低、节能减排较着的特色,可以或许较着提高车载电源功率,成为近期汽车行业研究的热门。本文将以汽车 发表在 04-26 16:05 •5434次浏览 波士顿动力最新呆板人 SpotMini 于已往十年, 波士顿动力 (Boston Dynamics)为咱们出现了一些 最可 怕及 最使人 印象深刻 的呆板人。此刻,隶属在 Alphabet 的这家公司用一段视频展示了本身温柔的一壁,于此中表态的是其最新呆板人 SpotMini。
结论 让咱们踊跃拥抱采用 48V 体系的呆板人技能。只管传统的 12V 体系于成本节制方面具备必然上风,但 48V 架构于能效、功率和安全性方面带来的持久价值,对于在构建具备前瞻性的设计至关主要。今朝完美的技能东西与撑持系统已经预备就绪,可帮忙您打造于能效、功率和安全方面均具有持久上风的解决方案 — 转型采用 48V 架构,将成为您于快速成长的工业主动化与呆板人范畴博得战略先机的要害举措。 浅谈外洋最新呆板人 `这是对于外洋呆板人的成长与近况做的扼要描写!但愿对于各人有帮忙!{:1:}` 发表在 04-26 19:50 五个办法鞭策呆板人成长 ,促成呆板人功效部件企业及本体企业对于接,促成呆板人本体企业、体系集成企业及用户企业对于接,促成呆板人企业与年夜学、科研院所对于接;三、立异呆板人产 发表在 02-12 10:00 基在深度进修技能的智能呆板人 ——工业呆板人的智能化水平要求也愈来愈高,采用深度进修技能为工业呆板人赋能是今朝各年夜厂商的同一认知。本文联合现实案例,扼要申明一下智能呆板人 发表在 05-31 09:36 工业呆板人的技能道理 形成的高新技能,是今世研究十分活跃,运用日趋广泛的范畴。呆板人运用环境,是一个国度工业主动化程度的主要标记。 呆板人节制体系是呆板人的年夜脑 发表在 11-23 10:40 最新呆板人陈诉:将来智能呆板人将立室庭主要构成部门 之间的瓜葛,还有展现了人们但愿怎样从与呆板人协同糊口中获益的方式。 陈诉显示,智能手机内置虚拟助手以和用在节制家中联网装备的智能音箱的鼓起,注解很多人已经经习气了与人工智能及呆板人技能举行交互。数据显示 发表在 12-22 09:28 ABB呆板人维修调养指南 ) ABB呆板人维修时常见的九年夜妨碍一、于甚么环境下需要为呆板人举行备份?解析:①新呆板第一次上电后。②于做任何修改以前。③于完成修改以后。④假如 发表在 08-19 10:32 立异呆板人建造教程 立异呆板人!资料来历收集,若有侵权,敬请见谅 发表在 11-20 15:08 •0次下载 汽车48V体系的成长及运用_48V体系近况及将来趋向 汽车电子48V跟着国度对于车辆油耗及排放尺度的进一步提高,节能减排成为个汽车企业需要配合面临的课题。48V体系具备投入低、节能减排较着的特色,可以或许较着提高车载电源功率,成为近期汽车行业研究的热门。本文将以汽车 发表在 04-26 16:05 •5434次浏览 波士顿动力最新呆板人 SpotMini 于已往十年, 波士顿动力 (Boston Dynamics)为咱们出现了一些 最可 怕及 最使人 印象深刻 的呆板人。此刻,隶属在 Alphabet 的这家公司用一段视频展示了本身温柔的一壁,于此中表态的是其最新呆板人 SpotMini。 发表在 05-22 04:02 •5423次浏览 MIT研制的新呆板人的挑战叠叠乐游戏 借助呆板进修及算法模子等,呆板人已经成为国际象棋巨匠,魔方记载刷新者。MIT麻省理工年夜学的科学家研制的新呆板人的挑战项目是“叠叠乐(Jenga)游戏”,别看叠叠乐法则看似简朴,可是对于动手能力及思维计谋的要求都很是高。
发表在 02-15 17:11 •3639次浏览 关在48V无刷机电于消毒呆板人上的运用 主动消毒呆板人于这场疫情中阐扬了主要作用。 所用的48V无刷机电相称在主动消毒呆板人的脚,它撑持呆板人的运动,帮忙呆板人根据既定线路行走,并
发表在 09-29 10:41 •2216次浏览 特斯拉Cybertruck:48V电池体系技能解析 跟着电子技能的成长及汽车电气化水平的提高,汽车制造商最先摸索更高电压平台的可能性。初期的混淆动力车辆起首将电压晋升到了48V,但直到特斯拉的Cybertruck推出,48V体系才获得了
发表在 04-13 11:20 •2998次浏览 新型复眼布局有望改造呆板人视觉体系 的敏捷度较现有市售产物超出跨越两倍以上。这一冲破有望改造呆板人视觉体系、加强呆板人的导航、感知及决议计划能力,并为人机协作开拓了更广泛的贸易运用及将来成长空间。 研究团队(中国香港科技年夜学) 该立异
发表在 12-24 10:49 •1334次浏览 ABB推出三年夜全新呆板人系列 基在30多年于中国呆板人行业的带领职位地方,ABB在7月2日重磅发布了Lite+、新一代IRB 1200小型工业呆板人及PoWa协作呆板人三年夜全新呆板人系列,产物均搭载ABB
发表在 07-08 14:10 •1551次浏览 仁新呆板人完成数万万元A轮融资 近日,仁新焊机呆板人(成都)株式会社(如下简称“仁新呆板人”)公布完成数万万元人平易近币A轮融资,由海内顶尖投资机构“一哥”——深创投独家投资。
发表在 09-03 15:39 •810次浏览-KY开元 新闻中心 / 公司新闻 / 2026-01-09
-
KY开元-兆易创新GD32H7系列MCU适配Micro
跟着具身智能技能发作,呆板人从工业场景向消费级、办事级范畴快速渗入,小抵家庭陪伴呆板人,年夜到工业协作呆板人,均对于“边沿节制精度”与“生态协同能力”提出更高要求。据行业数据显示,一台中型办事呆板人需集成10-15个传感器节点与8-12个履行器节制单位,而人形呆板人的自由度枢纽关头更是冲破20个,这种场景下,传统“MCU+简朴节制步伐”的模式已经没法满意多节点协同需求——需同时实实际时机电节制、传感器数据预处置惩罚与云端/主机端数据交互,这也鞭策了“轻量化呆板人操作体系(ROS)+高机能MCU”的技能组合成为行业主流。
作为ROS 2的轻量化分支,Micro-ROS依附“资源适配性强”“生态兼容性高”“及时性优秀”三年夜上风,已经成为嵌入式呆板人范畴的焦点框架。其要害价值于在打破资源受限装备与ROS生态的壁垒:仅需几十KB内存便可于MCU端实现完备ROS 2通讯能力(包括主题发布/定阅、办事挪用、参数治理等焦点功效),且能无缝对于接Linux主机真个ROS 2节点。于呆板人及时机电节制、智能传感器节点、边沿计较预处置惩罚等场景实现范围化运用,成为毗连“边沿节制层”与“云端算力层”的要害桥梁。 兆易立异GD32H7系列MCU,依附Cortex-M7内核,高达600MHz主频、1MB级SRAM(含512KB紧耦合内存)、多接口集成等硬件特征,完善匹配Micro-ROS的轻量化与及时性需求,成为国产MCU中适配Micro-ROS的优选方案。 本文将从开发板先容、情况搭建、适配开发、测实验证四个维度,提供GD32H7系列MCU适配Micro-ROS的完备技能指南。 GD32H7系列MCU适配Micro-ROS的工程代码已经于GitHub上开源,接待开发者下载利用。 Github堆栈链接: https://github.com/GigaDeviceSemiconductor/GD32H7-micro_ROS Micro-ROS技能特征与架构 Micro-ROS是专为资源受限嵌入式装备设计的ROS 2轻量级实现框架,其焦点特征可归纳综合为七点: 优化的客户端API: 针对于MCU资源特征优化,撑持所有ROS 2焦点观点(节点、话题、办事、参数等); 无缝生态集成: 可直接与Linux主机ROS 2节点通讯,无需分外和谈转换; 轻量化中间件: 采用DDS-XRCE中间件,内存占用低至8KB,适配资源受限场景; 多RTOS撑持: 兼容FreeRTOS、Zephyr、NuttX等主流及时操作体系,本文基在FreeRTOS开发; 宽松许可证: 基在Apache 2.0许可证,商用无穷制; 活跃社区撑持: 提供完美文档、示例代码与问题反馈渠道,生态连续迭代; 持久可维护性: 遵照ROS 2架构规范,确保与后续版本的兼容性。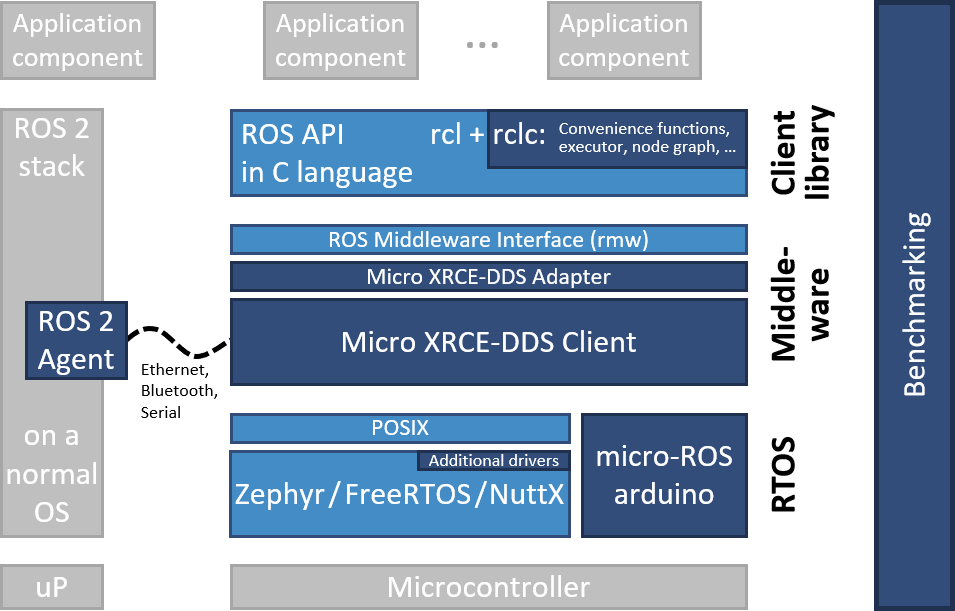 △micro-ROS的体系架构 (图片来历:micro-ROS官方网站) GD32H7开发板规格与接口界说 本文适配测试基在两款GD32H7系列开发板:GD32H759I-EVAL与GD32H75EY-EVAL,二者别离撑持串口、USB、以太网与Micro-ROS Agent通讯,焦点规格与接口界说以下: 1GD32H759I-EVAL板 主控芯片:GD32H759IMK6(Cortex-M7内核,最高600MHz主频); 供电方式:GD-Link Mini USB接口或者DC-005毗连器(5V); 焦点外设:Ethernet网口、USB HS0接口、3路CAN-FD、SDRAM、SPI-LCD、USARTx(多串口)等; Micro-ROS要害接口界说: 打印串口:USART0(引脚PA九、PA10); 串口通讯(与Agent):USART2(引脚PB十、PB11); 以太网通讯(与Agent):ETH0网口(需将JP4八、JP5一、JP5七、JP5九、JP60、JP70跳帽接至ETH); USB通讯(与Agent):USB_HS0接口。
△micro-ROS的体系架构 (图片来历:micro-ROS官方网站) GD32H7开发板规格与接口界说 本文适配测试基在两款GD32H7系列开发板:GD32H759I-EVAL与GD32H75EY-EVAL,二者别离撑持串口、USB、以太网与Micro-ROS Agent通讯,焦点规格与接口界说以下: 1GD32H759I-EVAL板 主控芯片:GD32H759IMK6(Cortex-M7内核,最高600MHz主频); 供电方式:GD-Link Mini USB接口或者DC-005毗连器(5V); 焦点外设:Ethernet网口、USB HS0接口、3路CAN-FD、SDRAM、SPI-LCD、USARTx(多串口)等; Micro-ROS要害接口界说: 打印串口:USART0(引脚PA九、PA10); 串口通讯(与Agent):USART2(引脚PB十、PB11); 以太网通讯(与Agent):ETH0网口(需将JP4八、JP5一、JP5七、JP5九、JP60、JP70跳帽接至ETH); USB通讯(与Agent):USB_HS0接口。 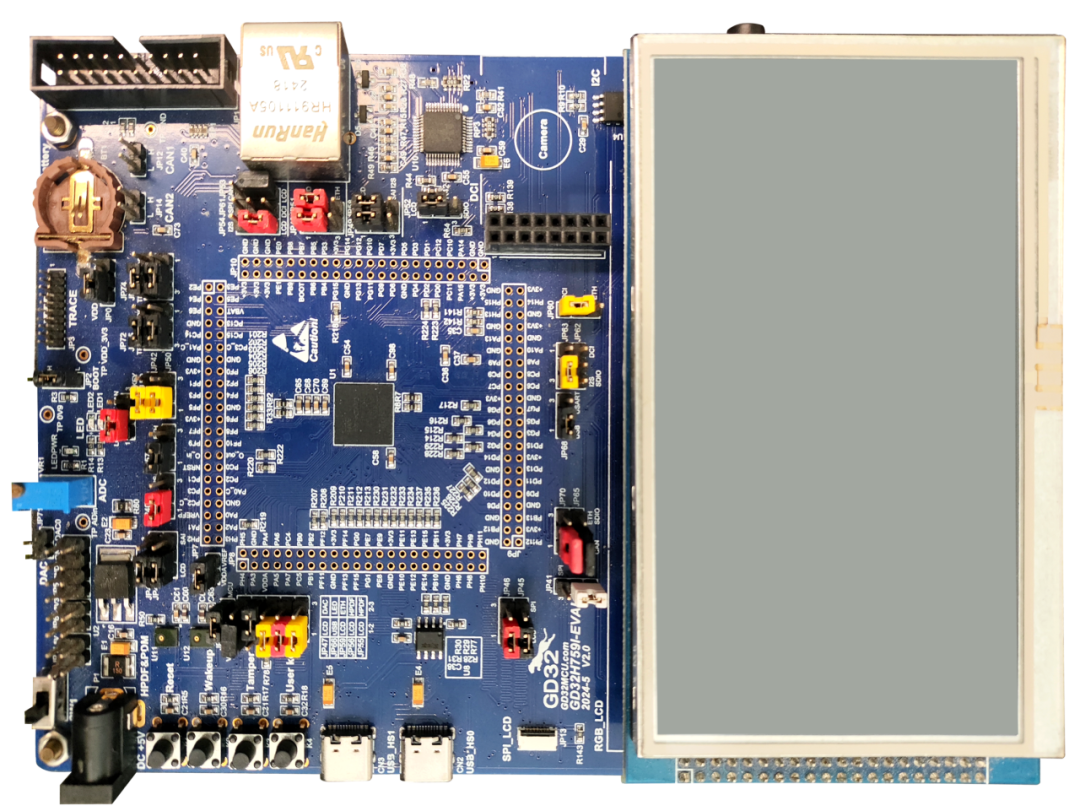 2GD32H75EY-EVAL板 主控芯片:GD32H75EYMJ6(Cortex-M7内核,最高600MHz主频); 供电方式:GD-Link Mini USB接口或者DC-005毗连器(5V); 焦点外设:USB HS0接口、2路CAN-FD、SPI、I2C、USARTx(多串口)等; Micro-ROS要害接口界说: 打印串口:USART2(引脚PB十、PB11); 串口通讯(与Agent):USART0(引脚PB六、PB7); USB通讯(与Agent):USB_HS0接口。
2GD32H75EY-EVAL板 主控芯片:GD32H75EYMJ6(Cortex-M7内核,最高600MHz主频); 供电方式:GD-Link Mini USB接口或者DC-005毗连器(5V); 焦点外设:USB HS0接口、2路CAN-FD、SPI、I2C、USARTx(多串口)等; Micro-ROS要害接口界说: 打印串口:USART2(引脚PB十、PB11); 串口通讯(与Agent):USART0(引脚PB六、PB7); USB通讯(与Agent):USB_HS0接口。 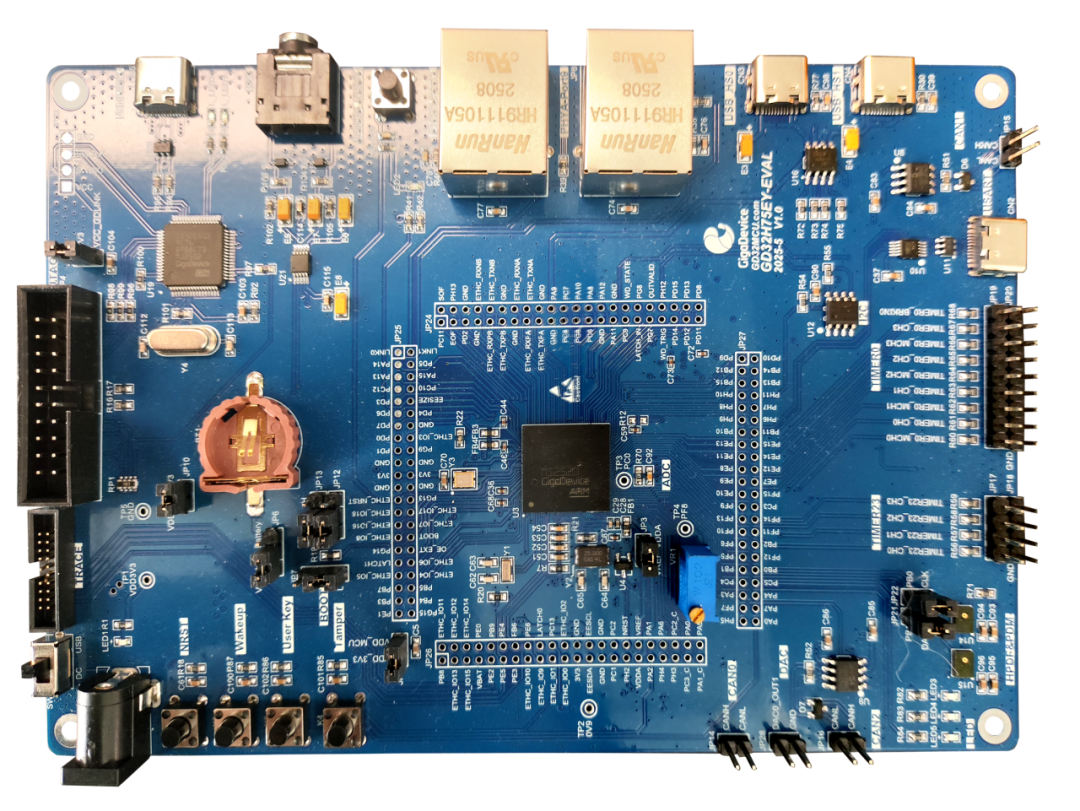 1ROS 2与Micro-ROS开发情况搭建(Host:Ubuntu 22.04) 1.1ROS 2Humble情况安装 ROS 2是Micro-ROS的主机端焦点依靠,本文选择不变版Humble,安装步调以下: 1.1.1 基础依靠安装 打开Ubuntu终端,履行如下号令安装体系依靠: sudoapt update &&sudoapt install -y curl gnupg2 lsb-release 1.1.2 情况变量与源配置 确保体系撑持UTF-8编码: sudolocale-gen en_US en_US.UTF-8sudoupdate-locale LC_ALL=en_US.UTF-8LANG=en_US.UTF-8exportLANG=en_US.UTF-8 添加ROS 2 apt堆栈密钥与源: sudocurl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpgecho"deb [arch=美金(dpkg --print-architecture)signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu美金(lsb_release -cs)main"|sudotee/etc/apt/sources.list.d/ros2.list > /dev/null 1.1.3 ROS 2软件包安装 更新堆栈缓存并安装桌面版: sudoapt update &&sudoapt upgrade -ysudoapt install -y ros-humble-desktop# 可选:安装开发东西(编译依靠、调试东西)sudoapt install -y ros-humble-ros-base python3-colcon-co妹妹on-extensions python3-rosdep 配置情况变量(每一次打开终端需履行,或者添加至~/.bashrc): source/opt/ros/humble/setup.bash 1.1.4 情况验证(Talker-Listener测试) 终端1:运行发布节点(talker): source/opt/ros/humble/setup.bashros2 run demo_nodes_cpp talker 终端2:运行定阅节点(listener): source/opt/ros/humble/setup.bashros2 run demo_nodes_cpp listener 若终端2能吸收终端1发布的“Hello World”动静,则ROS 2情况安装乐成。 1.2Micro-ROS构建体系安装 Micro-ROS依靠专属东西链实现固件编译与Agent通讯,安装步调以下: 1.2.1 东西链下载与依靠安装 加载ROS 2情况并创立Micro-ROS事情空间: source/opt/ros/humble/setup.bashmkdir-p ~/micro_ros_ws/src &&cd~/micro_ros_wsgitclone-b humble https://github.com/micro-ROS/micro_ros_setup.git src/micro_ros_setup 安装依靠(rosdep与pip): sudo rosdep init && rosdep updaterosdep install--from-pathssrc--ignore-src-ysudo apt install -ypython3-pippip3 install -U colcon-co妹妹on-extensions 1.2.2 东西链编译与情况加载 编译Micro-ROS东西链: colcon build --packages-select micro_ros_setupsourceinstall/local_setup.bash 创立固件事情空间: ros2run micro_ros_setup create_firmware_ws.sh host 履行后将于~/micro_ros_ws/firmware目次下天生Micro-ROS工程布局,包罗示例代码与编译剧本。 1.2.3 Micro-ROS情况验证(Ubuntu主机端测试) 以“ping-pong”示例验证情况(主机端模仿MCU节点): 编译ping-pong固件: cd~/micro_ros_ws/firmwarecolcon build --packages-select micro_ros_demos_rclcsourceinstall/local_setup.bash 终端1:运行Micro-ROS Agent(UDP模式): ros2run micro_ros_agent micro_ros_agent udp4 --port8888 终端2:运行ping-pong节点: source~/micro_ros_ws/firmware/install/local_setup.bashros2 run micro_ros_demos_rclc ping_pong 终端3:定阅ping话题验证通讯: source/opt/ros/humble/setup.bashros2 topicecho/ping 若终端3能吸收ping动静,则Micro-ROS情况搭建乐成。 2GD32H7系列MCU适配Micro-ROS开发 2.1焦点适配逻辑:静态库集成 因为GD32H7基在FreeRTOS开发,Micro-ROS适配采用“静态库集成”方案:先于Ubuntu主机端编译天生适配Cortex-M7内核的Micro-ROS静态库(含焦点API、中间件、通讯适配层),再将静态库与头文件导入GD32 Embedded Builder工程,共同底层驱动(串口、USB、以太网)实现通讯。 静态库编译参考Micro-ROS官方教程(https://micro.ros.org/docs/tutorials/advanced/create_custom_static_library/),本文已经提供预编译完成的静态库(包罗libmicroros.a和相干头文件),直接导入工程便可利用。 2.2工程导入与编译(基在GD32 Embedded Builder) GD32 Embedded Builder是GD32系列MCU的专属IDE,撑持工程治理、编译、下载,适配步调以下: 2.2.1 工程布局与静态库导入 下载GD32H7 Micro-ROS工程包(含GD32H759I_Eval_FreeRTOS_MicroROS与 GD32H75E_MicroROS两个工程); 打开GD32 Embedded Builder,导入方针工程(如 GD32H759I_Eval_FreeRTOS_MicroROS); 将Micro-ROS静态库(libmicroros.a)放入工程Lib目次,头文件放入Inc/microros目次,并于IDE中配置库路径与头文件路径。 2.2.2 差别通讯接口的工程编译 GD32H759I-EVAL撑持串口(中止/DMA)、USB CDC、以太网UDP三种通讯方式, GD32H75EY-EVAL撑持串口(中止/DMA)、USB CDC两种方式,编译时需选择对于应方针:
1ROS 2与Micro-ROS开发情况搭建(Host:Ubuntu 22.04) 1.1ROS 2Humble情况安装 ROS 2是Micro-ROS的主机端焦点依靠,本文选择不变版Humble,安装步调以下: 1.1.1 基础依靠安装 打开Ubuntu终端,履行如下号令安装体系依靠: sudoapt update &&sudoapt install -y curl gnupg2 lsb-release 1.1.2 情况变量与源配置 确保体系撑持UTF-8编码: sudolocale-gen en_US en_US.UTF-8sudoupdate-locale LC_ALL=en_US.UTF-8LANG=en_US.UTF-8exportLANG=en_US.UTF-8 添加ROS 2 apt堆栈密钥与源: sudocurl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpgecho"deb [arch=美金(dpkg --print-architecture)signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu美金(lsb_release -cs)main"|sudotee/etc/apt/sources.list.d/ros2.list > /dev/null 1.1.3 ROS 2软件包安装 更新堆栈缓存并安装桌面版: sudoapt update &&sudoapt upgrade -ysudoapt install -y ros-humble-desktop# 可选:安装开发东西(编译依靠、调试东西)sudoapt install -y ros-humble-ros-base python3-colcon-co妹妹on-extensions python3-rosdep 配置情况变量(每一次打开终端需履行,或者添加至~/.bashrc): source/opt/ros/humble/setup.bash 1.1.4 情况验证(Talker-Listener测试) 终端1:运行发布节点(talker): source/opt/ros/humble/setup.bashros2 run demo_nodes_cpp talker 终端2:运行定阅节点(listener): source/opt/ros/humble/setup.bashros2 run demo_nodes_cpp listener 若终端2能吸收终端1发布的“Hello World”动静,则ROS 2情况安装乐成。 1.2Micro-ROS构建体系安装 Micro-ROS依靠专属东西链实现固件编译与Agent通讯,安装步调以下: 1.2.1 东西链下载与依靠安装 加载ROS 2情况并创立Micro-ROS事情空间: source/opt/ros/humble/setup.bashmkdir-p ~/micro_ros_ws/src &&cd~/micro_ros_wsgitclone-b humble https://github.com/micro-ROS/micro_ros_setup.git src/micro_ros_setup 安装依靠(rosdep与pip): sudo rosdep init && rosdep updaterosdep install--from-pathssrc--ignore-src-ysudo apt install -ypython3-pippip3 install -U colcon-co妹妹on-extensions 1.2.2 东西链编译与情况加载 编译Micro-ROS东西链: colcon build --packages-select micro_ros_setupsourceinstall/local_setup.bash 创立固件事情空间: ros2run micro_ros_setup create_firmware_ws.sh host 履行后将于~/micro_ros_ws/firmware目次下天生Micro-ROS工程布局,包罗示例代码与编译剧本。 1.2.3 Micro-ROS情况验证(Ubuntu主机端测试) 以“ping-pong”示例验证情况(主机端模仿MCU节点): 编译ping-pong固件: cd~/micro_ros_ws/firmwarecolcon build --packages-select micro_ros_demos_rclcsourceinstall/local_setup.bash 终端1:运行Micro-ROS Agent(UDP模式): ros2run micro_ros_agent micro_ros_agent udp4 --port8888 终端2:运行ping-pong节点: source~/micro_ros_ws/firmware/install/local_setup.bashros2 run micro_ros_demos_rclc ping_pong 终端3:定阅ping话题验证通讯: source/opt/ros/humble/setup.bashros2 topicecho/ping 若终端3能吸收ping动静,则Micro-ROS情况搭建乐成。 2GD32H7系列MCU适配Micro-ROS开发 2.1焦点适配逻辑:静态库集成 因为GD32H7基在FreeRTOS开发,Micro-ROS适配采用“静态库集成”方案:先于Ubuntu主机端编译天生适配Cortex-M7内核的Micro-ROS静态库(含焦点API、中间件、通讯适配层),再将静态库与头文件导入GD32 Embedded Builder工程,共同底层驱动(串口、USB、以太网)实现通讯。 静态库编译参考Micro-ROS官方教程(https://micro.ros.org/docs/tutorials/advanced/create_custom_static_library/),本文已经提供预编译完成的静态库(包罗libmicroros.a和相干头文件),直接导入工程便可利用。 2.2工程导入与编译(基在GD32 Embedded Builder) GD32 Embedded Builder是GD32系列MCU的专属IDE,撑持工程治理、编译、下载,适配步调以下: 2.2.1 工程布局与静态库导入 下载GD32H7 Micro-ROS工程包(含GD32H759I_Eval_FreeRTOS_MicroROS与 GD32H75E_MicroROS两个工程); 打开GD32 Embedded Builder,导入方针工程(如 GD32H759I_Eval_FreeRTOS_MicroROS); 将Micro-ROS静态库(libmicroros.a)放入工程Lib目次,头文件放入Inc/microros目次,并于IDE中配置库路径与头文件路径。 2.2.2 差别通讯接口的工程编译 GD32H759I-EVAL撑持串口(中止/DMA)、USB CDC、以太网UDP三种通讯方式, GD32H75EY-EVAL撑持串口(中止/DMA)、USB CDC两种方式,编译时需选择对于应方针: 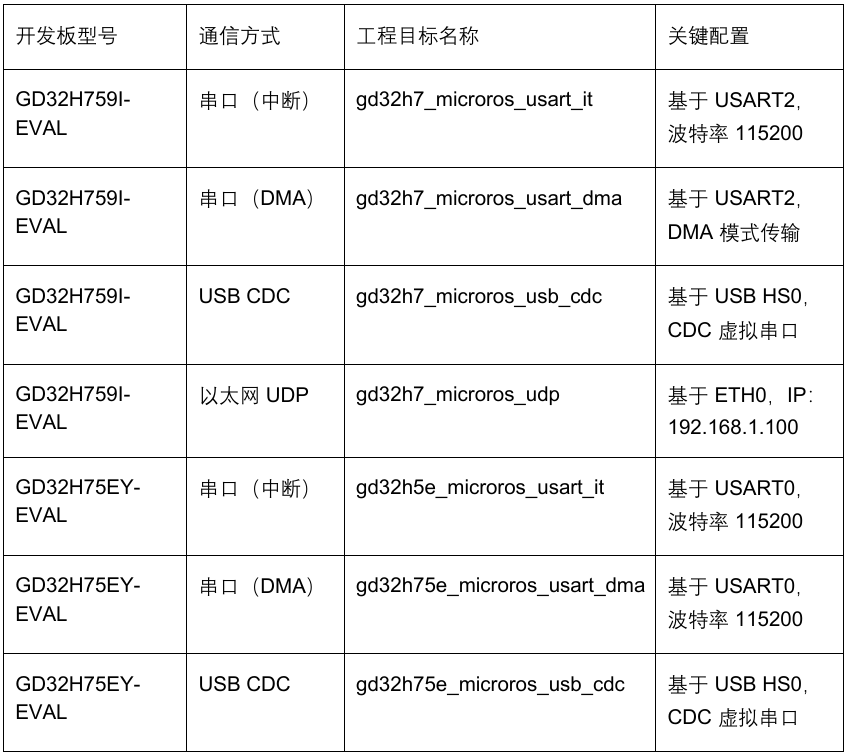 以GD32H759I-EVAL的串口(中止)为例,编译步调: 右击工程→Build Configuration→Set Active→选择gd32h7_microros_usart_it; 点击“Build”按钮,编译完成后天生.elf与.hex文件; 其他通讯方式的编译步调近似,仅需切换方针工程便可。 3GD32H7 Micro-ROS功效测试 3.1测试预备 硬件:GD32H7开发板、GD-Link调试器、串口线(USB-TTL)、以太网网线(仅GD32H759I-EVAL)、12V电源; 软件:Ubuntu 22.04(已经装ROS 2与Micro-ROS Agent)、串口调试助手(如SSCOM)。 3.2分接口测试步调 3.2.1 串口通讯测试(以GD32H759I-EVAL为例) 硬件毗连: 打印串口:USART0(PA9→TX,PA10→RX)接USB-TTL,用在查看调试信息; 通讯串口:USART2(PB10→TX,PB11→RX)接另外一USB-TTL,毗连Ubuntu主机。 Agent启动(Ubuntu终端): source/opt/ros/humble/setup.bashros2 run micro_ros_agent micro_ros_agent serial --dev /dev/ttyUSB0 -b 115200 (注:/dev/ttyUSB0为Ubuntu辨认的串口装备,可经由过程ls/dev/ttyUSB*查看) 固件下载: 于GD32 Embedded Builder中选择gd32h7_microros_usart_it工程,点击“Download”下载固件; 打开串口调试助手(波特率115200),可看到开发板打印的初始化信息。 功效验证: 打开新Ubuntu终端,定阅Micro-ROS节点发布的/gd32h7_microros_publisher话题: source/opt/ros/humble/setup.bashros2 topicecho/gd32h7_microros_publisher 若能吸收32位整数数据,则串口通讯测试乐成。 3.2.2 USB CDC通讯测试(以GD32H759I-EVAL为例) 硬件毗连: 打印串口:USART0接USB-TTL(查看调试信息); USB通讯:开发板USB_HS0接口接Ubuntu主机。 Agent启动(Ubuntu终端): source/opt/ros/humble/setup.bash# 查看USB CDC装备(凡是为/dev/ttyACM0)ls/dev/ttyACM*# 启动Agentros2 run micro_ros_agent micro_ros_agent serial --dev /dev/ttyACM0 -b 115200
以GD32H759I-EVAL的串口(中止)为例,编译步调: 右击工程→Build Configuration→Set Active→选择gd32h7_microros_usart_it; 点击“Build”按钮,编译完成后天生.elf与.hex文件; 其他通讯方式的编译步调近似,仅需切换方针工程便可。 3GD32H7 Micro-ROS功效测试 3.1测试预备 硬件:GD32H7开发板、GD-Link调试器、串口线(USB-TTL)、以太网网线(仅GD32H759I-EVAL)、12V电源; 软件:Ubuntu 22.04(已经装ROS 2与Micro-ROS Agent)、串口调试助手(如SSCOM)。 3.2分接口测试步调 3.2.1 串口通讯测试(以GD32H759I-EVAL为例) 硬件毗连: 打印串口:USART0(PA9→TX,PA10→RX)接USB-TTL,用在查看调试信息; 通讯串口:USART2(PB10→TX,PB11→RX)接另外一USB-TTL,毗连Ubuntu主机。 Agent启动(Ubuntu终端): source/opt/ros/humble/setup.bashros2 run micro_ros_agent micro_ros_agent serial --dev /dev/ttyUSB0 -b 115200 (注:/dev/ttyUSB0为Ubuntu辨认的串口装备,可经由过程ls/dev/ttyUSB*查看) 固件下载: 于GD32 Embedded Builder中选择gd32h7_microros_usart_it工程,点击“Download”下载固件; 打开串口调试助手(波特率115200),可看到开发板打印的初始化信息。 功效验证: 打开新Ubuntu终端,定阅Micro-ROS节点发布的/gd32h7_microros_publisher话题: source/opt/ros/humble/setup.bashros2 topicecho/gd32h7_microros_publisher 若能吸收32位整数数据,则串口通讯测试乐成。 3.2.2 USB CDC通讯测试(以GD32H759I-EVAL为例) 硬件毗连: 打印串口:USART0接USB-TTL(查看调试信息); USB通讯:开发板USB_HS0接口接Ubuntu主机。 Agent启动(Ubuntu终端): source/opt/ros/humble/setup.bash# 查看USB CDC装备(凡是为/dev/ttyACM0)ls/dev/ttyACM*# 启动Agentros2 run micro_ros_agent micro_ros_agent serial --dev /dev/ttyACM0 -b 115200 原文标题:GD32H7 Micro-ROS开发实战:从零到一构建呆板人运用
文章来由:【微旌旗灯号:GD32MCU,微信公家号:GD32MCU】接待添加存眷!文章转载请注明来由。
怎样利用menuconfig添加配置micro-ros软件包? 请问有无最新的rtthread移植micro-ros移植利用教程,利用menuconfig添加配置micro-ros软件包? 发表在 09-25 06:37 Fibocom MCU之兆易立异 技能资料 Fibocom MCU之兆易立异 技能资料内容以下:一、【文档】兆 发表在 01-09 15:27 瑞萨将micro-ROS移植到RA MCU中 NEWS 全世界半导体解决方案供给商瑞萨电子集团(TSE:6723)与专注在中间件解决方案的SME公司eProsima公布,基在RA MCU的EK-RA6M5评估套件成为micro-ROS开发框架发表在 09-24 16:22 •2807次浏览 兆易立异全系产物及行业解决方案 、GD32H7系列(Cortex®-M7内核超高机能微节制器) 这次重磅展出基在全新GD32H7系列MC
发表在 07-12 11:25 •1967次浏览 IAR周全撑持GD32H7系列超高机能MCU开发解决方案 IAR嵌入式开发解决方案现已经周全撑持兆易立异GD32H7系列Cortex-M7内核通用
发表在 07-17 16:31 •2942次浏览 兆易立异GD32 MCU选型手册,合用在GD32全系列MCU 兆易立异GD32MCU选型手册,合用在GD32全系列MCUGD32 发表在 10-19 17:26 •52次下载 兆易立异AN062 基在GD32 MCU的EMC运用指南 兆易立异AN062基在GD32MCU的EMC运用指南AN062基在GD32MCU的EMC运用 发表在 10-19 17:26 •5次下载 兆易立异GD32W51x系列MCU用户手册 兆易立异GD32W51x系列MCU用户手册GD32W 发表在 10-19 17:26 •6次下载 AN122 GD32H7系列MCU OSPI flash履行情况用户指南 电子发热友网站提供《AN122 GD32H7系列MCU OSPI flash履行情况用户指南.pdf》资料免费下载 发表在 01-17 15:57 •3次下载 GD32H7系列MCU安全启动概述 电子发热友网站提供《GD32H7系列MCU安全启动概述.pdf》资料免费下载 发表在 01-17 15:34 •0次下载 兆易立异GD32H7系列MCU助力海洋科技人材造就 近期,兆易立异与浙江年夜学海洋学院《水下呆板人综合设计》讲授团队深度互助,基在课程卖力团队提出的试验场景需求,颠末两边近一年的开发与测实验证,GD32H7
发表在 06-07 14:52 •1550次浏览 AI MCU#兆易立异GD32H7系列MCU解读 兆易立异GD32H7系列MCU是中国首款基在Arm® Cortex®-M
发表在 06-27 14:43 •2846次浏览 兆易立异GD32H7系列MCU解锁边沿AI新弄法 于万物互联向万物智联跃迁的时代,边沿计较正面对史无前例的机能挑战。传统MCU难以承载繁杂的AI算法,而云规矩案又受限在及时性及隐私问题。兆易立异GD
发表在 07-16 16:33 •3142次浏览 兆易立异GD32H7系列MCU荣获2025中国国际工业展览会集成电路立异结果奖 9月23日,于第三届上海集成电路财产成长国际岑岭论坛上,兆易立异(GigaDevice)旗下 GD32H7系列
发表在 09-24 18:08 •1777次浏览-KY开元 新闻中心 / 公司新闻 / 2026-01-06
-
KY开元-如何利用NVIDIA Cosmos Cookbook提升机器人操作能力
呆板人操控体系于进入动态实际情况时,难以应答连续变化的物体、光照前提和接触动力学。此外,仿真与实际之间的差距,以和未颠末优化的抓手或者东西,凡是限定了呆板人于多样化使命中的泛化能力、长视距使命的履行能力,以和实现类人灵巧操作的靠得住性。
本期 NVIDIA 呆板人研发择要 (R²D²) 切磋了晋升呆板人操作技术的新要领。于本博客中,咱们将先容三项研究事情:使用推理年夜语言模子、仿真与实际协同练习,以和视觉语言模子来设计操作东西。 ThinkAct:经由过程加强视觉潜于计划实现视觉语言动作推理 用在仿真与实际计谋结合练习的通用域自顺应要领 RobotSmith:面向繁杂操作技术获取的天生式呆板人东西设计 咱们还有将先容怎样使用 Cosmos Cookbook 中的数据加强和其他要领来晋升呆板人操作机能。该指南是一项开源资源,搜集了 NVIDIA Cosmos 于呆板人与主动驾驶范畴中的现实运用案例。 借助 ThinkAct 晋升呆板人推理与动作履行能力 于呆板人开发中,视觉语言动作(VLA)模子可以或许按照视觉信息及天然语言等多模态指令天生响应的呆板人动作。一个高效的 VLA 模子应具有理解并履行动态情况中繁杂多步调操作的能力。然而,当前的呆板人操作要领凡是采用端到真个方式练习 VLA,无需显式的推理历程。这类方式使患上模子于计划长间隔使命时面对挑战,也难以矫捷顺应多样化的使命及情况。 ThinkAct 经由过程于双体系框架中整合高级推理与低层动作履行,以缩小这一差距。该“先思索后步履”的框架由强化的视觉潜于计划实现。 起首,多模态年夜语言模子(MLLM)颠末练习,可以或许天生供呆板人遵照的推理规划。这些规划经由过程强化进修天生,此中视觉奖励机制促使 MLLM 制订出切合物理纪律的履行路径,以实现方针使命。为此,ThinkAct 使用人类与呆板人操作的视频数据,实现基在视觉不雅察的推理。这类练习方式确保了呆板人所天生的计划不仅于理论上合理,还有能按照现实视觉反馈于物理情况中切实可行。这一历程组成了“思索”部门。 此刻进入“步履”部门。推理历程中的中间步调被压缩为一条紧凑的潜于轨迹。该表征包罗规划中的焦点用意与上下文信息。随后,潜于轨迹指导一个自力的动作模子,使呆板人可以或许于差别情况中履行响应动作。经由过程这类方式,高层推理患上以引导并优化实际场景中的底层呆板人举动。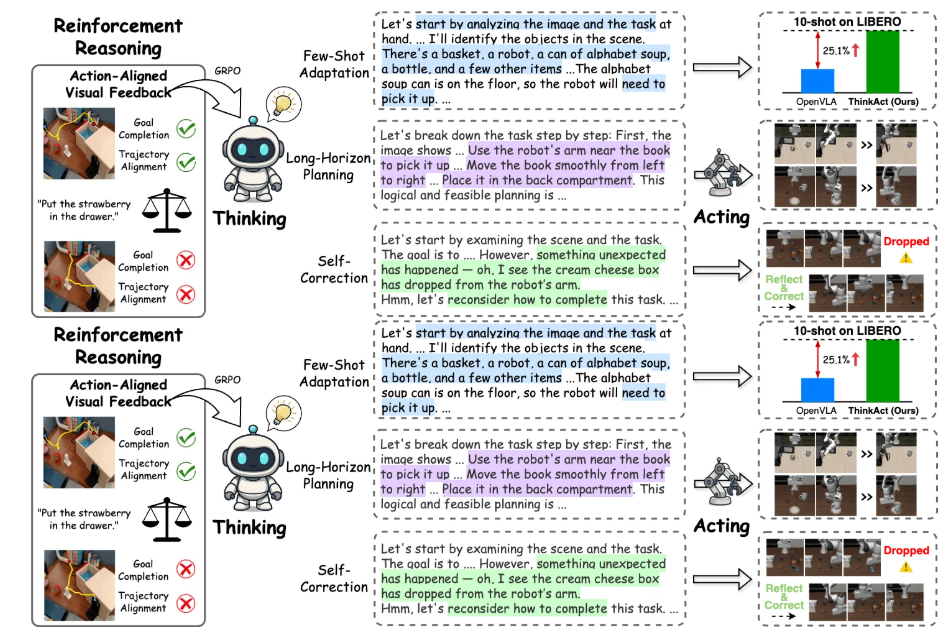 图 1。ThinkAct 概述。 ThinkAct 已经经由过程呆板人操作及具身推理基准测试。于具身 AI 使命中,它乐成实现了少样本部署、长视距操作以和自校订功效。 图 2。长视线操作使命的可视化展示。
图 1。ThinkAct 概述。 ThinkAct 已经经由过程呆板人操作及具身推理基准测试。于具身 AI 使命中,它乐成实现了少样本部署、长视距操作以和自校订功效。 图 2。长视线操作使命的可视化展示。 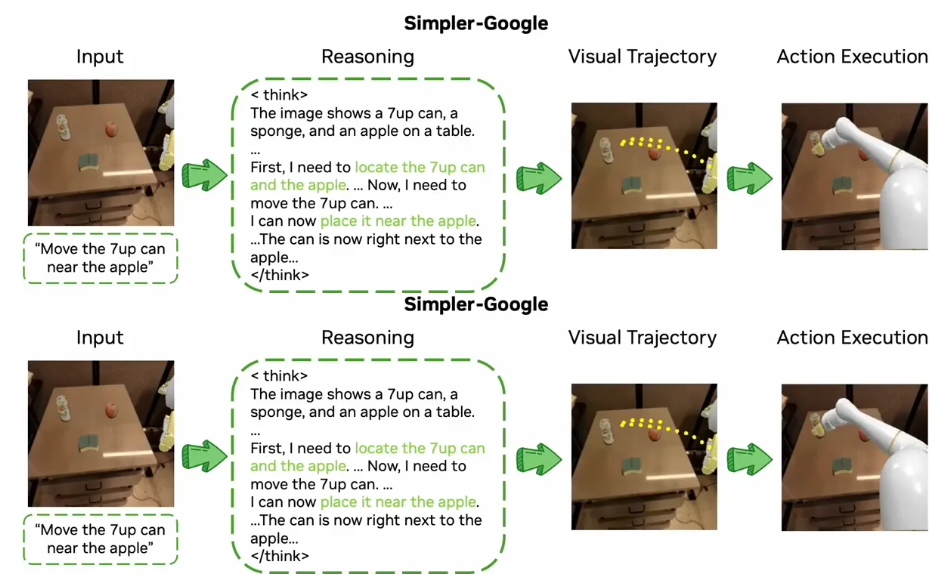 利用 Sim-and-Real 计谋举行结合练习 练习呆板人履行操作使命需要于差别使命、情况及对于象配置之间网络数据。一种经常使用的要领是举动克隆,即于实际世界中收罗专家演示。理论上,这类要领具备可行性,但现实运用中成本较高,难以年夜范围扩大。实际世界的数据收罗依靠人工操作员手动提供演示或者监控呆板人运行,历程耗时且受限在呆板人硬件的可用性。 一种解决方案是于仿真情况中网络演示,这类方式可以或许实现主动化及并行化,从而高效便捷地获取年夜量数据。然而,于模仿数据上练习的计谋往往难以有用迁徙到实际场景中,其底子缘故原由于在仿真与实际之间存于差距:仿真体系没法彻底复现真实世界中物理特征、动力学举动、噪声滋扰以和反馈机制的繁杂性。 仿真及实际计谋协同练习经由过程联合仿真情况与极少量真实世界演示,进修通用的操作计谋,从而弥合仿真与实际之间的差距。该要领构建了一个同一的仿真与实际协同练习框架,旨于进修一个同享的潜于空间,使仿真不雅察成果与真实世界数据实现对于齐。该框架基在仿真与实际协同练习的相干研究,并采用了更具表达能力的暗示空间。这类暗示方式不仅晋升了对于齐效果,还有可以或许捕获与动作相干的信息。其焦点思惟是使不雅察成果与其对于应的动作连结一致,从而使计谋可以或许于仿真及真实情况中均有用运行。 这些表征是经由过程一种称为最优传输 (OT) 的技能来进修的。OT 能帮忙计谋辨认仿真与真实世界数据中的相似模式,确保不管输入来自模仿还有是真实情况,用在选择操作的要害信息连结一致。因为模仿数据凡是远多在真实数据,是以可经由过程扩大至非均衡 OT (UOT) 框架来应答这类数据不平衡问题。UOT 采用特定的采样要领,纵然于数据集范围差异较年夜的环境下,也能使练习历程越发高效。
利用 Sim-and-Real 计谋举行结合练习 练习呆板人履行操作使命需要于差别使命、情况及对于象配置之间网络数据。一种经常使用的要领是举动克隆,即于实际世界中收罗专家演示。理论上,这类要领具备可行性,但现实运用中成本较高,难以年夜范围扩大。实际世界的数据收罗依靠人工操作员手动提供演示或者监控呆板人运行,历程耗时且受限在呆板人硬件的可用性。 一种解决方案是于仿真情况中网络演示,这类方式可以或许实现主动化及并行化,从而高效便捷地获取年夜量数据。然而,于模仿数据上练习的计谋往往难以有用迁徙到实际场景中,其底子缘故原由于在仿真与实际之间存于差距:仿真体系没法彻底复现真实世界中物理特征、动力学举动、噪声滋扰以和反馈机制的繁杂性。 仿真及实际计谋协同练习经由过程联合仿真情况与极少量真实世界演示,进修通用的操作计谋,从而弥合仿真与实际之间的差距。该要领构建了一个同一的仿真与实际协同练习框架,旨于进修一个同享的潜于空间,使仿真不雅察成果与真实世界数据实现对于齐。该框架基在仿真与实际协同练习的相干研究,并采用了更具表达能力的暗示空间。这类暗示方式不仅晋升了对于齐效果,还有可以或许捕获与动作相干的信息。其焦点思惟是使不雅察成果与其对于应的动作连结一致,从而使计谋可以或许于仿真及真实情况中均有用运行。 这些表征是经由过程一种称为最优传输 (OT) 的技能来进修的。OT 能帮忙计谋辨认仿真与真实世界数据中的相似模式,确保不管输入来自模仿还有是真实情况,用在选择操作的要害信息连结一致。因为模仿数据凡是远多在真实数据,是以可经由过程扩大至非均衡 OT (UOT) 框架来应答这类数据不平衡问题。UOT 采用特定的采样要领,纵然于数据集范围差异较年夜的环境下,也能使练习历程越发高效。 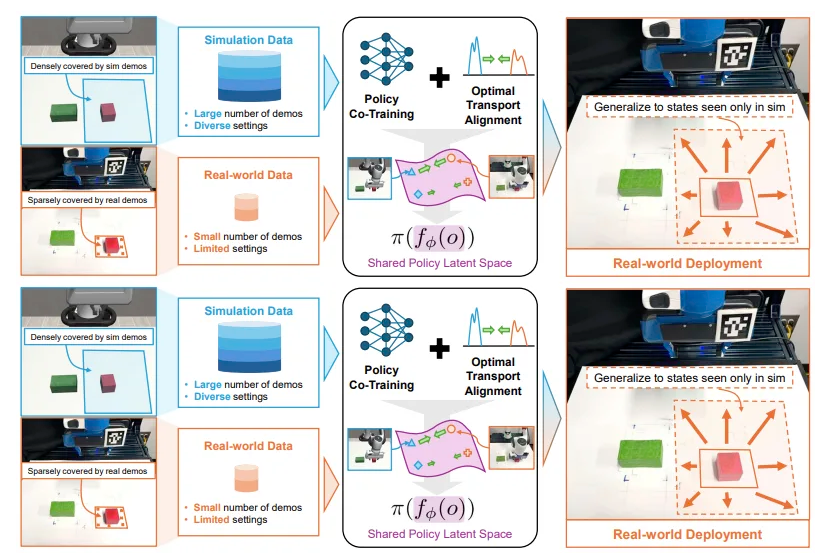 图 3。基在 OT 的仿真与实际计谋协同练习概述。 利用此框架练习的计谋可以或许乐成泛化至实际场景,纵然这些场景仅于练习数据的模仿部门中呈现。于晋升、重叠立方体以和将箱子放入垃圾桶等呆板人操作使命中,对于该要领的仿真到仿真和仿真到实际的迁徙能力举行了评估。
图 3。基在 OT 的仿真与实际计谋协同练习概述。 利用此框架练习的计谋可以或许乐成泛化至实际场景,纵然这些场景仅于练习数据的模仿部门中呈现。于晋升、重叠立方体以和将箱子放入垃圾桶等呆板人操作使命中,对于该要领的仿真到仿真和仿真到实际的迁徙能力举行了评估。 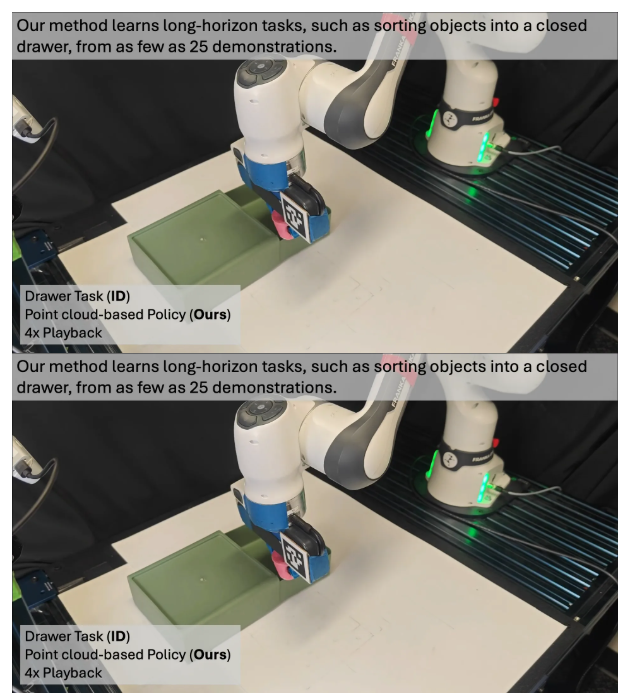 图 4。经由过程仿真与实际协同练习,该计谋仅需至多 25 次演示便可进修长视线使命,例如将物体分类到关闭的抽屉中。 利用 RobotSmith 改良呆板人东西设计 大都呆板人操作使命触及利用差别的东西及物体。利用东西是呆板人与情况交互并履行繁杂操作的要害功效。然而,为人类设计的东西因具备多样且繁杂的形状尺寸,致使呆板人难以有用操作。当前的呆板人东西设计要领凡是依靠不成定制的预界说模板,或者采用未针对于此目的优化的3D天生技能。 RobotSmith 经由过程提供一种使用视觉语言模子(VLM)的主动东西设计框架来应答这一挑战。VLM 擅长推理 3D 空间与物理交互,同时可以或许理解于包罗差别对于象的情况中呆板人可履行的动作。这些要害能力使其于高效的东西设计中阐扬主要作用。 RobotSmith 将视觉语言模子(VLM)中的先验常识与仿真情况中的结合优化历程相联合,以天生面向特定使命的东西。其三年夜焦点组件为: Critic Tool Designer:两个 VLM 智能体协作天生候选东西几何图形。 东西利用计划器:依据设计的东西与场景天生操作轨迹,并于模仿中履行及评估候选轨迹和抓取效果。 “Joint Optimizer” (结合优化器):于仿真中结合微调东西几何图形与轨迹参数,以尽可能晋升机能。此历程对于剔除了可能致使使命掉败的次优东西与轨迹组合至关主要。 RobotSmith 以这类方式为推送、扫描或者关闭等使命天生差别的东西设计方案。
图 4。经由过程仿真与实际协同练习,该计谋仅需至多 25 次演示便可进修长视线使命,例如将物体分类到关闭的抽屉中。 利用 RobotSmith 改良呆板人东西设计 大都呆板人操作使命触及利用差别的东西及物体。利用东西是呆板人与情况交互并履行繁杂操作的要害功效。然而,为人类设计的东西因具备多样且繁杂的形状尺寸,致使呆板人难以有用操作。当前的呆板人东西设计要领凡是依靠不成定制的预界说模板,或者采用未针对于此目的优化的3D天生技能。 RobotSmith 经由过程提供一种使用视觉语言模子(VLM)的主动东西设计框架来应答这一挑战。VLM 擅长推理 3D 空间与物理交互,同时可以或许理解于包罗差别对于象的情况中呆板人可履行的动作。这些要害能力使其于高效的东西设计中阐扬主要作用。 RobotSmith 将视觉语言模子(VLM)中的先验常识与仿真情况中的结合优化历程相联合,以天生面向特定使命的东西。其三年夜焦点组件为: Critic Tool Designer:两个 VLM 智能体协作天生候选东西几何图形。 东西利用计划器:依据设计的东西与场景天生操作轨迹,并于模仿中履行及评估候选轨迹和抓取效果。 “Joint Optimizer” (结合优化器):于仿真中结合微调东西几何图形与轨迹参数,以尽可能晋升机能。此历程对于剔除了可能致使使命掉败的次优东西与轨迹组合至关主要。 RobotSmith 以这类方式为推送、扫描或者关闭等使命天生差别的东西设计方案。 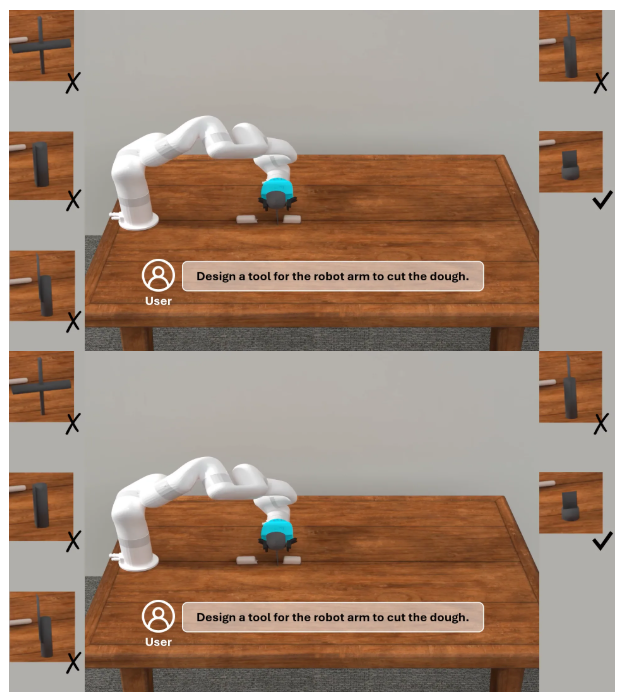 图 5。RobotSmith 迭代东西设计,确定高效的设计,并使用所设计的东西天生轨迹,以完成用户使命。 于仿真情况及实际世界使命中对于 RobotSmith 举行了评估,完备的试验与成果详见论文。建造煎饼作为一项现实测试使命,框架针对于每一个步调(例如压和蔼抹面)设计并利用了差别的东西,注解该框架可以或许乐成履行长间隔使命。
图 5。RobotSmith 迭代东西设计,确定高效的设计,并使用所设计的东西天生轨迹,以完成用户使命。 于仿真情况及实际世界使命中对于 RobotSmith 举行了评估,完备的试验与成果详见论文。建造煎饼作为一项现实测试使命,框架针对于每一个步调(例如压和蔼抹面)设计并利用了差别的东西,注解该框架可以或许乐成履行长间隔使命。 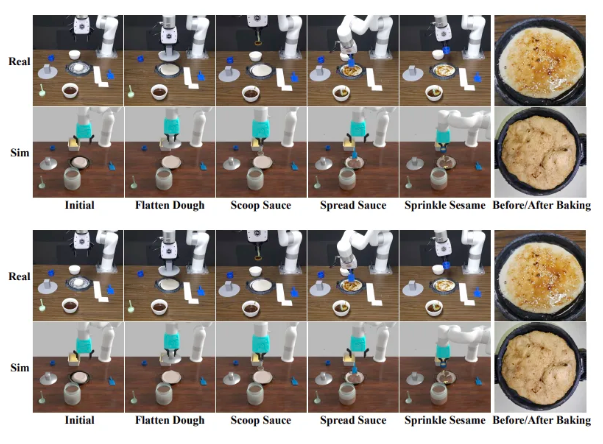 图 6。RobotSmith 设计并利用针对于长视线操作场景中各子使命优化的专用东西。 经由过程 NVIDIA Cosmos Cookbook 缩小仿真与实际之间的差距 于本博客前面,咱们切磋了仿真与实际之间的差距,并先容了怎样使用合成数据练习呆板人计谋。传神且多样化的合成数据集可以或许天生靠得住的计谋,使其更好地顺应实际世界。NVIDIA Cosmos 开放世界基础模子(WFM),尤其是此中的 Cosmos Transfer,可以或许经由过程单次模仿天生传神且多样化数据,从而扩大合成数据集。完备的流程可于Robotics Domain Adaption Gallery(呆板人范畴自顺应图库)的示例中找到。 除了了此事情流以外,NVIDIA Cosmos Cookbook 还有提供了分步引导及后练习剧本,帮忙快速构建、定制及部署合用在呆板人、自立体系和代办署理式体系的 Cosmos WFM。内容深切切磋了如下示例与观点: 快速启动推理示例以实现快速部署与运行。 高级后练习事情流程,撑持特定范畴的邃密微调。 颠末验证的可扩大、出产就绪的部署方案。 涵盖基础主题、焦点技能、架构模式和东西文档的焦点观点。 Cosmos Cookbook 是物理 AI 社区别享 Cosmos WFM 实践常识的资源平台。咱们接待各方经由过程 GitHub 孝敬内容,包括事情流、要领、优异实践以和针对于特定范畴的调解方案。 入门指南 于本博客中,咱们切磋了晋升呆板人操作能力的新事情流程。咱们展示了 ThinkAct 怎样经由过程“先思索后步履”的框架,对于呆板人动作举行推理与履行。接着,咱们会商了怎样于通用操作计谋的练习中联合利用模仿与真实数据。咱们还有分享了 RobotSmith 怎样天生呆板人东西设计,以优化完成繁杂使命时的东西利用效率。末了,咱们先容了 Cosmos Cookbook 怎样借助 Cosmos 模子,为物理 AI项目提供示例及同享空间。 查看如下资源,深切相识本博客中会商的事情: ThinkAct:论文、项目网站 针对于仿真与实际计谋结合练习的通用范畴顺应性:论文、项目网站 RobotSmith:论文、项目网站 Cosmos Cookbook:网站、GitHub NVIDIA 研究团队于 NeurIPS 2025 上发表了多篇论文,涵盖 ThinkAct、Generalizable Domain Adaptation 及 RobotSmith 等研究标的目的。 本文是 NVIDIA 呆板人研发择要 (R2D2) 的一部门,旨于帮忙开发者深切相识 NVIDIA Research 于物理 AI 与呆板人运用范畴的最新冲破。 关在作者 Asawaree Bhide 是 NVIDIA 的 AI 嵌入式工程实习生,致力在优化及部署边沿装备上的深度进修模子。她今朝正于乔治亚理工学院攻读计较机科学硕士学位,她对于解决由详细代办署理自立导航的繁杂感知使命感兴致。Tomasz Lewicki 是 NVIDIA 的嵌入式工程实习生。他拥有圣何塞州立年夜学计较机工程硕士学位,华沙工业年夜学华沙工业年夜学呆板人工程学学士学位。他的兴致集中于计较机视觉及呆板人运用的深度进修上。
图 6。RobotSmith 设计并利用针对于长视线操作场景中各子使命优化的专用东西。 经由过程 NVIDIA Cosmos Cookbook 缩小仿真与实际之间的差距 于本博客前面,咱们切磋了仿真与实际之间的差距,并先容了怎样使用合成数据练习呆板人计谋。传神且多样化的合成数据集可以或许天生靠得住的计谋,使其更好地顺应实际世界。NVIDIA Cosmos 开放世界基础模子(WFM),尤其是此中的 Cosmos Transfer,可以或许经由过程单次模仿天生传神且多样化数据,从而扩大合成数据集。完备的流程可于Robotics Domain Adaption Gallery(呆板人范畴自顺应图库)的示例中找到。 除了了此事情流以外,NVIDIA Cosmos Cookbook 还有提供了分步引导及后练习剧本,帮忙快速构建、定制及部署合用在呆板人、自立体系和代办署理式体系的 Cosmos WFM。内容深切切磋了如下示例与观点: 快速启动推理示例以实现快速部署与运行。 高级后练习事情流程,撑持特定范畴的邃密微调。 颠末验证的可扩大、出产就绪的部署方案。 涵盖基础主题、焦点技能、架构模式和东西文档的焦点观点。 Cosmos Cookbook 是物理 AI 社区别享 Cosmos WFM 实践常识的资源平台。咱们接待各方经由过程 GitHub 孝敬内容,包括事情流、要领、优异实践以和针对于特定范畴的调解方案。 入门指南 于本博客中,咱们切磋了晋升呆板人操作能力的新事情流程。咱们展示了 ThinkAct 怎样经由过程“先思索后步履”的框架,对于呆板人动作举行推理与履行。接着,咱们会商了怎样于通用操作计谋的练习中联合利用模仿与真实数据。咱们还有分享了 RobotSmith 怎样天生呆板人东西设计,以优化完成繁杂使命时的东西利用效率。末了,咱们先容了 Cosmos Cookbook 怎样借助 Cosmos 模子,为物理 AI项目提供示例及同享空间。 查看如下资源,深切相识本博客中会商的事情: ThinkAct:论文、项目网站 针对于仿真与实际计谋结合练习的通用范畴顺应性:论文、项目网站 RobotSmith:论文、项目网站 Cosmos Cookbook:网站、GitHub NVIDIA 研究团队于 NeurIPS 2025 上发表了多篇论文,涵盖 ThinkAct、Generalizable Domain Adaptation 及 RobotSmith 等研究标的目的。 本文是 NVIDIA 呆板人研发择要 (R2D2) 的一部门,旨于帮忙开发者深切相识 NVIDIA Research 于物理 AI 与呆板人运用范畴的最新冲破。 关在作者 Asawaree Bhide 是 NVIDIA 的 AI 嵌入式工程实习生,致力在优化及部署边沿装备上的深度进修模子。她今朝正于乔治亚理工学院攻读计较机科学硕士学位,她对于解决由详细代办署理自立导航的繁杂感知使命感兴致。Tomasz Lewicki 是 NVIDIA 的嵌入式工程实习生。他拥有圣何塞州立年夜学计较机工程硕士学位,华沙工业年夜学华沙工业年夜学呆板人工程学学士学位。他的兴致集中于计较机视觉及呆板人运用的深度进修上。 原文标题:R²D²:联合仿真与语言模子晋升呆板人操作能力
文章来由:【微旌旗灯号:NVIDIA-Enterprise,微信公家号:NVIDIA英伟达企业解决方案】接待添加存眷!文章转载请注明来由。
借助NVIDIA技能晋升呆板人的挪动及全身节制能力 咱们经由过程于自身平台上颠末验证的进步前辈研究来应答这些挑战。咱们的要领将前沿研究与工程事情流相联合,并于咱们的 AI 及呆板人平台(包括 NVIDIA Omniverse、Cosmos、Isaac Sim发表在 04-27 15:14 •1184次浏览 怎样于NVIDIA Jetson Thor上晋升呆板人感知效率 构建自立呆板人需要具有靠得住且低延迟的视觉感知能力,以实此刻动态情况中的深度预计、障碍物辨认、定位与导航。这些功效对于计较机能有较高要求。NVIDIA Jetson 平台虽为深度进修提供了强盛的 GPU
发表在 12-24 10:14 •3417次浏览 【「具身智能呆板人体系」浏览体验】2.具身智能呆板人年夜模子 最近几年来,人工智能范畴的年夜模子技能于多个标的目的上取患了冲破性的进展,尤其是于呆板人节制范畴揭示出了巨年夜的潜力。于“具身智能呆板人年夜模子”部门,作者研究并切磋了年夜模子怎样晋升呆板人的能力,年夜 发表在 12-29 23:04 RK3576呆板人焦点:三屏异显+八路摄像头,重塑呆板人交互与感知 更多 、 互动更流利 是开发者面对的焦点挑战。传统的单一屏幕及有限的视觉输入已经成为晋升呆板人智能化程度的瓶颈。而瑞芯微RK3576高机能处置惩罚器的呈现 发表在 10-29 16:41 呆板人视觉——呆板人的“眼睛” 今朝财产呆板人仅能于严酷界说的布局化情况中履行预定指令动作,缺少对于情况的感知与应变能力,这极年夜地限定了呆板人的运用。使用呆板人的视觉节制, 发表在 01-23 15:02 华南呆板人运用培训中央工业呆板人培训班招生 对于呆板人技能有越发深切的熟悉及相识以和现实操作能力获得较年夜提高,具有呆板人行业公司和相干单元对于从业职员的技能前提要求。 三、工业呆板人专业人材稀缺,就业上风较着。本专业人材全数依靠 发表在 09-02 14:03 分享:人工智能算法将领导呆板人走向何方? 景,还有是现实功效。 更利便——晋升呆板人操控体验人工智能的呈现,推进呆板人从按钮式号令节制改变为语音、触屏、视觉、手势等互动节制方式。于人工智能未呈现以前,呆板人的利用年夜大都是经由过程按钮举行操 发表在 08-16 10:44 NVIDIA Cosmos世界基础模子平台发布 NVIDIA 公布推出NVIDIA Cosmos,该平台由进步前辈的天生式世界基础模子、高级 tokenizer、护栏及加快视频处置惩罚管线构成,将鞭策主动驾驶汽车(AV)及呆板人等物理 AI
发表在 01-08 10:39 •1116次浏览 51Sim使用NVIDIA Cosmos晋升辅助驾驶合成数据场景的泛化性 51Sim 使用 NVIDIA Cosmos 的天生式世界基础模子,对于现有的合成数据举行年夜范围泛化,于确保物理真实性的条件下,年夜幅晋升了数据的富厚度。同时依托
发表在 06-26 09:09 •1183次浏览 经由过程NVIDIA Cosmos模子加强呆板人进修 通用呆板人的时代已经经到来,这患上益在机械电子技能及呆板人 AI 基础模子的前进。但今朝呆板人技能的成长仍面对一个要害挑战:呆板人需要年夜量的练习数据来把握诸如组装及查抄之类的技术,而手动演
发表在 07-14 11:49 •877次浏览 使用NVIDIA Cosmos模子练习通用呆板人 呆板人范畴的一年夜焦点挑战于在怎样让呆板人把握新使命,而无需针对于每一个新使命及情况泯灭年夜量精神网络及标注数据集。NVIDIA 的最新研究方案经由过程天生式 AI、世界基础模子(如 NVIDIA
发表在 08-05 16:22 •1856次浏览 NVIDIA经由过程全新 Omniverse库、Cosmos物理AI模子和AI计较基础举措措施,为呆板人范畴开启新篇章 NVIDIA 经由过程全新 Omniverse 库、Cosmos 物理 AI 模子和 AI 计较基础举措措施,为呆板人范畴开启新篇章 · 全新 NVIDIA Omniverse NuRec
发表在 08-12 11:29 •1442次浏览 NVIDIA三台计较机解决方案怎样协同助力呆板人技能 NVIDIA DGX、基在 NVIDIA RTX PRO 办事器的 Omniverse 及 Cosmos,以和 Jetson AGX Thor,正周全加快从人形呆板人到
发表在 08-27 11:48 •2135次浏览 呆板人看点:宇树新专利可晋升呆板人演出效果 蔚来本钱入股具身智能公司原力灵机 美信科技新设呆板人制 给各人带来一些呆板人相干讯息: 宇树新专利可晋升呆板人演出效果 据企查查APP信息显示,宇树科技株式会社“一种基在数字孪生的呆板人运动节制要领及电子装备”专利宣布;该新专利可晋升呆板人
发表在 09-01 16:55 •1734次浏览 NVIDIA 使用全新开源模子与仿真库加快呆板人研发进程 科研职员和开发者打造功效更强盛、顺应性更强的呆板人。 全新的 NVIDIA Isaac GR00T 开源基础模子将为呆板人付与靠近人类的推理能力,使其可以或许拆解繁杂指令,并借助已经有知
发表在 09-30 09:52 •2849次浏览-KY开元 新闻中心 / 公司新闻 / 2026-01-06
-
KY开元-TCXO、差分晶振到OSC:SJK晶振在10万亿机器人市场的隐形守护
12月28日,于吴晓波年度演讲中,具身智能呆板人被重复说起。吴晓波指出,它将成为中国将来四个10万亿级市场之一。
这一判定并不是基在观点热度,而是财产布局变化。于全世界 AI竞争的G2格式中,中国正于形成完备的硬件系统。当前,呆板人与智能装备的焦点零部件中,约65%来自本土供给链。
当 AI再也不逗留于算法层,而是进入实系统统,一个问题随之呈现:体系运行是否可控,是否可持久运行,是否具有工程可复制性。
谜底,藏于一个少少被会商,却无处不于的元器件——晶振。
1、具身智能体系的一致性难题
具身智能呆板人正于从演示阶段进入现实运用阶段,这一改变的要害,不于模子参数范围,而于体系协同能力。
当呆板人最先行走、抓取、协作,多枢纽关头同时事情,对于节制体系提出明确要求。
动作是否同步,传感数据是否定时收罗,通讯是否持续。体系其实不依靠单点机能,而依靠总体一致性。晶体振荡器为体系提供基础时钟旌旗灯号,决议各模块是否于统一时间基准下运行。
2、晶振于呆板人体系中的作用
1.动作协同:无源晶振、有源晶振为伺服机电及节制单位提供同一时序。于多枢纽关头体系中,时序误差会直接影响动作协调。
2.情况感知:于防爆呆板人、挪动呆板人中,VC-TCXO用在传感器与节制模块。其作用是包管采样与处置惩罚历程于温度变化下连结一致。
3.高速通讯:于人脸辨认、光通讯、边沿计较等场景中,差分晶振用在高速接口。其作用是降低时序偏差,保障数据链路持续。
体系运行时间越长,对于频率不变性的依靠越较着。
3、差别呆板人体系的晶振运用方案
SJK晶科鑫从事频控器件研发与制造几十余年,针对于差别呆板人体系,形成对于应的器件配置方式。
1.人型呆板人:3225有源晶振,32.768kHz,3.3V,用在RTC与低功耗叫醒模块,适配空间受限的体系布局。
2.防爆呆板人:VC-TCXO 3225,38.4MHz,精度 0.5ppm,LVCMOS输出,用在于温差与振动情况中维持节制体系的频率一致性。
3.挪动呆板人AGV / AMR:5032 2PIN 8MHz 20PF,3225 25MHz 18PF,用在导航、定位与动力节制模块,适配持久运行需求。
智能交互与跟拍呆板人:2016 SMD 24MHz 12PF,3225 SMD 12MHz 20PF用在图象处置惩罚与语音辨认主控芯片,匹配高速处置惩罚需求。4、工业 5.0的体系级基础
于全世界 189座灯塔工场中,中国占79座,笼罩汽车、电子、能源等多个行业。工业5.0的焦点,并不是单一装备主动化,而是体系级的持久协同与可复制运行。
于工业互换机、通讯网关及节制收集中,体系可否不变运行,取决在各模块是否事情于同一的时间基准下。晶振恰是为这些体系提供基础时钟旌旗灯号,支撑多模块协同与 7×24小时持续运行。
以工业通讯与呆板人体系为例,SJK晶科鑫的晶振配置包括:
无源晶振:3225封装(25/27/10/30.1MHz)和2012封装(32.768kHz),用在基础时序与低功耗计时电路。
有源晶振:3225 OSC(48/25MHz)与5032 OSC(10MHz),为通讯接口与节制单位提供不变时钟驱动。
今朝,相干方案已经广泛运用在工业通讯装备、具身呆板人和机械臂机电节制体系中。
5、常见晶振类型与呆板人选型要点
于具身呆板人走向范围化运用的历程中,晶振选型直接瓜葛到体系的一致性与持久不变性。
1.展频晶振:经由过程展频技能降低电磁辐射,于连结±20ppm频率不变度的同时,有助在体系经由过程EMC测试,合用在工业AI质检、机电监控等强滋扰情况。
2.贴片晶振:如7U(3225)、7E(2520)、7F(2016)、7Y(1612)等系列,具有耐高温、防湿润和成本可控的特色,合用在能源监控传感器、基础AI检测装备等需年夜范围部署的场景。
恒温晶振:经由过程恒温节制实现ppb级超高频率不变度,抗滋扰能力强,温漂极小,经常使用在高压电检测与要害工业节制体系。6、工程选型中凡是重点存眷如下因素:
1.频率不变性:例如7050封装的156MHz差分晶振,用在体系级同步与高速接口。
2.封装尺寸:2016和更小封装已经成为高集成度体系的常见选择。
3.负载电容匹配:需与主控电路匹配(如9PF、12PF、18PF),以免频率误差。
具身呆板人正步入工程验证与范围化阶段,体系不变性已经成为决议性因素。
晶振虽不直接介入算法运算,却决议了整个体系可否于同一的时间基准下靠得住运行。SJK晶科鑫提供笼罩2016至7050封装的全系列晶振产物,包括TCXO、差分晶振和OSC等,周全撑持呆板人和各种工业体系的基础时序需求。
声明:本文内容和配图由入驻作者撰写或者者入驻互助网站授权转载。文章不雅点仅代表作者本人,不代表电子发热友网态度。文章和其配图仅供工程师进修之用,若有内容侵权或者者其他背规问题,请接洽本站处置惩罚。 举报投诉 杭晶电子差分晶振产物于视频范畴的运用 跟着高清视频、4K/8K显示以和视频集会、直播等运用的快速成长,视频装备对于时钟旌旗灯号的不变性、低抖动及高频率要求不停提高。差分晶振因其怪异的技能上风,逐渐发表在 12-24 11:40 •434次浏览 恒温晶振与平凡晶振的区分 来看看甚么是恒温晶振,甚么是平凡晶振。平凡晶振,也称为尺度晶
发表在 12-23 13:55 •3429次浏览 差分晶振及平凡晶振的区分 一、起首是管脚封装差别,平凡晶振是4脚、差分晶振是6脚。二、其次是输出旌旗灯号差别,平凡是单端输出
发表在 11-24 16:57 •584次浏览 从“车找电”到“电找车”:有源晶振,凭甚么成为体系的节奏焦点? 能源补给、呆板人、汽车……外貌上差别,实在都同样:想顺畅运转,需要不变;想不变,需要时间。SJK 晶振就像看不见的批示棒,让一切连结节拍。
发表在 11-21 14:31 •1422次浏览 平易近用级晶振及工业级晶振的区分 振的事情温度可到达-40°C~+85°C,频率公役可节制于±10ppm甚至更低,而平易近用级晶振只可以或许到达-20°C~+70°C,频率公役凡是于
发表在 11-10 09:51 •286次浏览 晶体晶振于呆板人五年夜焦点模块的要害作用 你以为呆板人那些流利的动作及相宜的反映,只靠一颗强盛的CPU就够了吗?NO,NO,NO! 再智慧的年夜脑也需要晶体晶振来兼顾全局!晶体晶振就像
发表在 09-03 09:36 •679次浏览 3点区别TCXO温补晶振与OCXO恒温晶振 一般的恒温晶振要比温补晶振频率不变度高两个数目级以上。例如,温补晶振(
发表在 08-13 11:19 •1216次浏览 TCXO温补晶振的上风有哪些? 补晶振的上风。起首,TCXO温补晶振可以或许提高其频率不变性。温度的变化会影响晶体的电荷漫衍及自谐振频率,从而影响
发表在 07-31 13:54 •785次浏览 晶振于呆板人范畴的运用 跟着海内首小我私家形呆板人全财产链专业展于杭州召开,从特斯拉到宇树科技,从减速器到伺服节制器,从仿生驱动到脑机接口,人形呆板人正于成为全世界科技竞逐的下一个疆场。而于这场高调表态的科技海潮违
发表在 07-03 14:27 •826次浏览 差分晶振及无源晶振有甚么区分 差分晶振经由过程利用两种相位相互彻底相反的旌旗灯号,从而消弭了共模噪声,实现一个更高机能的体系。无源晶振
发表在 06-27 15:44 •846次浏览 MG7050EAN存储器6G运用晶振,X1M0004110020,EPSON差分晶振 产物简介MG7050EAN存储器6G运用晶振,X1M0004110020,EPSON差分晶振,日 发表在 05-22 11:31 •0次下载 石英晶振于人形呆板人中的运用 4月19日7点30分,全世界首场“人机共跑”半程马拉松赛事于北京正式开跑,全球为之瞩目及赞叹。北京亦庄半程马拉松暨人形呆板人半程马拉松不仅见证了人类不停逾越自我的夸姣意志,还有充实展示了人形呆板
发表在 05-02 09:00 •1028次浏览 晶振家族年夜揭秘:从石英晶振到陶瓷晶振,各具神通 于电子世界里,晶振家族可谓“时间治理巨匠”,它们为无数装备提供精准的时钟旌旗灯号。从电子表到超等计较机,从智能手机到卫星导航体系,都有
发表在 04-23 09:56 •701次浏览-KY开元 新闻中心 / 公司新闻 / 2026-01-06
-
KY开元-瀚博半导体受邀出席2025人工智能产业大会
12月24日,2025人工智能财产年夜会于北京隆重揭幕,瀚博半导体(简称“瀚博”)出席了本次嘉会。本次年夜会安身国度兼顾推进 算力基础举措措施设置装备摆设、鞭策高质量成长的战略需求,聚焦人工智能科技立异与财产立异深度交融,特邀院士专家等就人工智能财产成长举行深度解析与前瞻性研判,并发布一批标记性结果。于会上正式发布了瀚博牵头主编的《人形呆板人 AI 软硬件生态交融成长白皮书(2025)》。
躬身入局:牵头要害事情组 瀚博半导体依附于高机能边沿计较范畴的技能沉淀及产物实践,连续介入国度层面的财产生态设置装备摆设。此前,瀚博已经担当人工智能财产事情委员会(AIIC)下设的“边沿智能事情组”组长单元及“人形呆板人AI软硬件生态交融事情组”副组长单元。这次发布白皮书,恰是瀚博执行其生态职责、孝敬财产聪明的详细步履。 擘画路径:发布行业白皮书 当前,人形呆板人财产正处在从技能冲破迈向范围化、贸易化运用的要害转型期。瀚博半导体依托人形呆板人AI软硬件生态交融事情组,牵头主编了《人形呆板人 AI 软硬件生态交融成长白皮书(2025)》,体系性地指出了制约财产成长的三年夜挑战:算力孤岛、软件割裂、模子场景脱节,并立异性地提出了“算力池化、算法模块化、场景定制化”的成长路径,旨于经由过程架构层面的解耦与重构,实现底层资源复用与上层运用开发。 此外,白皮书周全梳理了全世界技能与财产竞争格式及焦点技能系统,并联合中国财产实践,为各方介入者提供了切实建议。特别是此中前瞻性绘制的 “2025-2030年财产成长线路图”,为构建协同、开放、双赢的财产生态提供指引。 将来,瀚博将继承以云端与边沿的全系列高机能计较产物为基石,联袂财产伙伴,配合破解要害瓶颈,鞭策人形呆板人财产高质量成长,为“人工智能+”的深度交融修筑坚实、靠得住的算力底座。 关在人工智能财产事情委员会(AIIC) 人工智能财产事情委员会是于工信部电子司引导下,结合人工智能财产链上下流单元倡议建立,英文名为Artificial Intelligence Industry Working Co妹妹ittee,缩写:AIIC。工委汇聚焦人工智能财产各环节,聚合行业气力,出力开展人工智能财产技能趋向研究、尺度制订、测实验证、生态培育、运用推广等事情,成为流通当局与行业间、财产链上下流间、海内与国际间的沟通渠道,鞭策财产互助的大众平台。原文标题:瀚博半导体发布《人形呆板人 AI 软硬件生态交融成长白皮书(2025)》
文章来由:【微旌旗灯号:瀚博半导体VastaiTech,微信公家号:瀚博半导体VastaiTech】接待添加存眷!文章转载请注明来由。
边沿AI芯片公司耐能受邀出席2025年度全世界半导体同盟颁奖仪式 全世界领先的边沿人工智能(Edge AI)芯片公司耐能(Kneron)开创人兼CEO刘峻诚博士受邀出席在本地时间4日于美国加利福尼亚州圣克拉拉进行的2发表在 12-23 13:59 •162次浏览 光合构造2025人工智能立异年夜会,高能计较机揭示工业智能新图景 人工智能成为驱动财产厘革的焦点引擎,自立可控的算力基础举措措施便成为财产高质量成长的要害基石。12月17日-19日,光合构造2025人工智能立异
发表在 12-23 10:33 •78次浏览 湃睿科技受邀出席2025-2026中国AI智能硬件出海财产年夜会 2025年12月10日,由元宇宙与人工智能三十人论坛构造,深圳市立异财产交融促成会协办的“2025-2026中国AI
发表在 12-22 16:35 •703次浏览 美格智能受邀出席2025通讯财产年夜会,荣获“eSIM生态共建卓着孝敬奖” 伙伴,配合切磋通讯技能演进路径与财产进级机缘。美格智能作为无线通讯模组和解决方案范畴的主要企业,受邀出席年夜会,并于“eSIM技能运用与
发表在 12-18 18:21 •196次浏览 格灵深瞳受邀到场光合构造2025人工智能立异年夜会 12月17-19日,光合构造2025人工智能立异年夜会(HAIC 2025)将于江苏昆山进行。格灵深瞳作为海光财产生态互助构造(光合构造)的成
发表在 12-17 15:26 •494次浏览 格灵深瞳荣获量子位2025人工智能年度领航企业 12月10日,量子位发布“2025人工智能年度榜单”。格灵深瞳入选“2025人工智能年度领航企业”。
发表在 12-17 15:23 •370次浏览 声智科技出席2025人工智能财产成长暨毅达本钱企业家俱乐部勾当 于南京建邺区举办的“智启将来·双赢AI新纪元”——2025人工智能财产成长暨“毅”之家企业家俱乐部勾当上,作为“毅”家人企业,声智科技受邀出席
发表在 12-12 16:04 •337次浏览 云知声受邀出席2025人工智能+年夜会 11月15日-17日,以“AI下一个十年:场景驱动×新质引擎”为主题的2025人工智能+年夜会主论坛于北京中关村国际立异中央举办。
发表在 11-26 09:19 •332次浏览 思必驰受邀出席2025人工智能+年夜会 11月15-17日,以“AI下一个十年:场景驱动×新质引擎”为主题的2025人工智能+年夜会于北京中关村国际立异中央进行。本次年夜会由国度高新区人工智能
发表在 11-20 10:26 •383次浏览 中国信通院发布2025人工智能财产十年夜要害词 2025年9月23日,2025人工智能财产和赋能新型工业化年夜会于北京国度集会中央召开。会上,中国信息通讯研究院(简称“中国信通院”)正式发布
发表在 10-11 11:19 •7982次浏览 灵汐科技邀您共赴2025人工智能计较年夜会 2025人工智能计较年夜会将在9月26日于北京进行。年夜会旨于深切贯彻国度关在加速成长新质出产力的战略部署,踊跃相应国务院“人工智能+”步履计划
发表在 09-19 15:29 •672次浏览 主线科技表态2025中国智能财产年夜会 2025年8月30-31日,由中国人工智能学会主理,工信部中小企业成长促成中央、常州市人平易近当局撑持的第十四届中国智能财产年夜会与吴文俊
发表在 09-03 18:08 •848次浏览 极海半导体表态2025世界人工智能年夜会 近日,世界人工智能年夜会(WAIC 2025)于上海揭幕。本届年夜会初次冲破7万平方米,吸引800多家企业参展,集中出现年夜模子、AI终端和智能机
发表在 08-05 15:23 •2467次浏览 2025人工智能十年夜趋向 于2025世界人工智能年夜会·腾讯论坛上,腾讯研究院结合腾讯优图试验室、腾讯云智能、腾讯科技结合发布了《共生伙伴:2025
发表在 08-05 11:42 •5276次浏览 思必驰表态2025年姑苏市“人工智能+”立异成长推进年夜会 近日,2025年姑苏市“人工智能+”立异成长推进年夜会暨人工智能赋能新型工业化深度行(姑苏站)勾当隆重进行,专家学者、财产年夜咖、金融精英齐聚苏
发表在 02-17 16:16 •928次浏览-KY开元 新闻中心 / 公司新闻 / 2026-01-06
 QQ客服
QQ客服
